setserial Command in Linux
The setserial utility is an essential tool within the Linux ecosystem, designed to manage and configure serial ports. It empowers administrators to adjust serial port settings, making it a valuable asset for system maintenance and troubleshooting.
The setserial command in Linux is a versatile tool for configuring and managing serial ports. It enables users to modify serial port attributes dynamically, facilitating customized communication setups. Mastery of the setserial utility enhances your ability to oversee and optimize serial communications.
Table of Contents
Here is a comprehensive guide to the options available with the setserial command −
- Installing setserial in Linux
- Syntax of the setserial Command
- setserial Command Options
- Examples of setserial Command in Linux
Installing setserial in Linux
The setserial utility may not be installed by default on your Linux distribution. Below, you'll find the commands to install setserial on various Linux systems −
Debian-based Systems (e.g., Ubuntu, Linux Mint) −
sudo apt install setserial
Red Hat-based Systems (e.g., Fedora, CentOS, RHEL) −
sudo dnf install setserial
Arch Linux-based Systems (e.g., Manjaro) −
sudo pacman -S setserial
openSUSE −
sudo zypper install setserial
Syntax of setserial Command
The basic syntax for using the setserial utility is −
setserial [options] device [parameters]
- [options] − Various flags to customize the command's behavior.
- device − Specifies the serial port to be configured.
- [parameters] − Denote the specific settings to be applied to the chosen serial port.
setserial Command Options
The setserial command includes several general options that enhance its functionality. Here are the commonly used options −
| Option | Description |
|---|---|
| -a | When reporting the configuration of a serial device, display all available information about the device. |
| -b | When reporting the configuration of a serial device, provide a concise summary of the device's configuration, useful during the bootup process or in the /etc/rc script. |
| -G | Output the configuration information of the serial port in a format that can be reused as command-line arguments for setserial. |
| -q | Operate in quiet mode, reducing the amount of output generated by setserial. |
| -v | Operate in verbose mode, providing additional status information about the serial port. |
| -W | Perform wild interrupt initialization and exit (no longer relevant in Linux kernels after version 2.1). |
| -z | Clear the serial flags before setting new flags, related to the automatic saving of serial flags using the -G option. |
Examples of setserial Command in Linux
Here are some practical scenarios demonstrating how to effectively use the setserial utility −
- Displaying Serial Port Settings
- Configuring Baud Rate
- Outputting Configurations for Reuse
- Using Quiet Mode
- Activating Verbose Mode
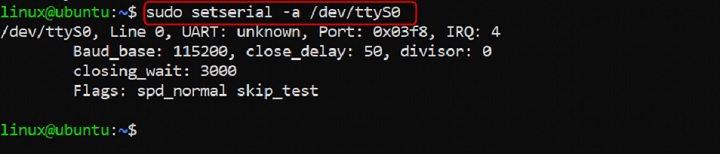
Displaying Serial Port Settings
To view the current settings of a specific serial port, you can use −
sudo setserial -a /dev/ttyS0
In this instance, the command displays all settings related to the serial port /dev/ttyS0, allowing you to review its configuration.
Configuring Baud Rate
For setting the baud rate of a serial port, you can use −
sudo setserial /dev/ttyS0 baud_base 115200
This command offers a summarized version of the serial port /dev/ttyS0 settings, which is ideal for including in the bootup process or within the /etc/rc script.

Outputting Configurations for Reuse
To print the configuration information in a format that can be reused as command-line arguments, you might use −
sudo setserial -G /dev/ttyS0
This command provides the settings of the serial port /dev/ttyS0 in a manner that can be fed back into setserial, facilitating easy reuse and scripting.

Using Quiet Mode
When you want setserial to print fewer lines of output, you can opt for −
sudo setserial -q /dev/ttyS0
This reduces the verbosity of the output, providing only the essential information about the serial port /dev/ttyS0.

Activating Verbose Mode
For additional status output and detailed information about the serial port settings, you can run −
sudo setserial -v /dev/ttyS0
This command enables verbose mode, giving you more insights into the operations and settings of the serial port /dev/ttyS0.

Conclusion
The setserial command in Linux is a powerful utility for managing and configuring serial ports. By understanding its purpose, syntax, options, and practical applications, you can effectively control serial port settings and enhance your system's communication capabilities.
Whether you're displaying all available information, providing configuration summaries, outputting reusable configurations, using quiet mode, or activating verbose mode, mastering the setserial utility offers a robust and dynamic solution. Incorporating the setserial command into your administrative toolkit enhances your ability to maintain a well-configured and optimized communication environment.
