- Graph Theory - Home
- Graph Theory - Introduction
- Graph Theory - History
- Graph Theory - Fundamentals
- Graph Theory - Applications
- Types of Graphs
- Graph Theory - Types of Graphs
- Graph Theory - Simple Graphs
- Graph Theory - Multi-graphs
- Graph Theory - Directed Graphs
- Graph Theory - Weighted Graphs
- Graph Theory - Bipartite Graphs
- Graph Theory - Complete Graphs
- Graph Theory - Subgraphs
- Graph Theory - Trees
- Graph Theory - Forests
- Graph Theory - Planar Graphs
- Graph Theory - Hypergraphs
- Graph Theory - Infinite Graphs
- Graph Theory - Random Graphs
- Graph Representation
- Graph Theory - Graph Representation
- Graph Theory - Adjacency Matrix
- Graph Theory - Adjacency List
- Graph Theory - Incidence Matrix
- Graph Theory - Edge List
- Graph Theory - Compact Representation
- Graph Theory - Incidence Structure
- Graph Theory - Matrix-Tree Theorem
- Graph Properties
- Graph Theory - Basic Properties
- Graph Theory - Coverings
- Graph Theory - Matchings
- Graph Theory - Independent Sets
- Graph Theory - Traversability
- Graph Theory Connectivity
- Graph Theory - Connectivity
- Graph Theory - Vertex Connectivity
- Graph Theory - Edge Connectivity
- Graph Theory - k-Connected Graphs
- Graph Theory - 2-Vertex-Connected Graphs
- Graph Theory - 2-Edge-Connected Graphs
- Graph Theory - Strongly Connected Graphs
- Graph Theory - Weakly Connected Graphs
- Graph Theory - Connectivity in Planar Graphs
- Graph Theory - Connectivity in Dynamic Graphs
- Special Graphs
- Graph Theory - Regular Graphs
- Graph Theory - Complete Bipartite Graphs
- Graph Theory - Chordal Graphs
- Graph Theory - Line Graphs
- Graph Theory - Complement Graphs
- Graph Theory - Graph Products
- Graph Theory - Petersen Graph
- Graph Theory - Cayley Graphs
- Graph Theory - De Bruijn Graphs
- Graph Algorithms
- Graph Theory - Graph Algorithms
- Graph Theory - Breadth-First Search
- Graph Theory - Depth-First Search (DFS)
- Graph Theory - Dijkstra's Algorithm
- Graph Theory - Bellman-Ford Algorithm
- Graph Theory - Floyd-Warshall Algorithm
- Graph Theory - Johnson's Algorithm
- Graph Theory - A* Search Algorithm
- Graph Theory - Kruskal's Algorithm
- Graph Theory - Prim's Algorithm
- Graph Theory - Borůvka's Algorithm
- Graph Theory - Ford-Fulkerson Algorithm
- Graph Theory - Edmonds-Karp Algorithm
- Graph Theory - Push-Relabel Algorithm
- Graph Theory - Dinic's Algorithm
- Graph Theory - Hopcroft-Karp Algorithm
- Graph Theory - Tarjan's Algorithm
- Graph Theory - Kosaraju's Algorithm
- Graph Theory - Karger's Algorithm
- Graph Coloring
- Graph Theory - Coloring
- Graph Theory - Edge Coloring
- Graph Theory - Total Coloring
- Graph Theory - Greedy Coloring
- Graph Theory - Four Color Theorem
- Graph Theory - Coloring Bipartite Graphs
- Graph Theory - List Coloring
- Advanced Topics of Graph Theory
- Graph Theory - Chromatic Number
- Graph Theory - Chromatic Polynomial
- Graph Theory - Graph Labeling
- Graph Theory - Planarity & Kuratowski's Theorem
- Graph Theory - Planarity Testing Algorithms
- Graph Theory - Graph Embedding
- Graph Theory - Graph Minors
- Graph Theory - Isomorphism
- Spectral Graph Theory
- Graph Theory - Graph Laplacians
- Graph Theory - Cheeger's Inequality
- Graph Theory - Graph Clustering
- Graph Theory - Graph Partitioning
- Graph Theory - Tree Decomposition
- Graph Theory - Treewidth
- Graph Theory - Branchwidth
- Graph Theory - Graph Drawings
- Graph Theory - Force-Directed Methods
- Graph Theory - Layered Graph Drawing
- Graph Theory - Orthogonal Graph Drawing
- Graph Theory - Examples
- Computational Complexity of Graph
- Graph Theory - Time Complexity
- Graph Theory - Space Complexity
- Graph Theory - NP-Complete Problems
- Graph Theory - Approximation Algorithms
- Graph Theory - Parallel & Distributed Algorithms
- Graph Theory - Algorithm Optimization
- Graphs in Computer Science
- Graph Theory - Data Structures for Graphs
- Graph Theory - Graph Implementations
- Graph Theory - Graph Databases
- Graph Theory - Query Languages
- Graph Algorithms in Machine Learning
- Graph Neural Networks
- Graph Theory - Link Prediction
- Graph-Based Clustering
- Graph Theory - PageRank Algorithm
- Graph Theory - HITS Algorithm
- Graph Theory - Social Network Analysis
- Graph Theory - Centrality Measures
- Graph Theory - Community Detection
- Graph Theory - Influence Maximization
- Graph Theory - Graph Compression
- Graph Theory Real-World Applications
- Graph Theory - Network Routing
- Graph Theory - Traffic Flow
- Graph Theory - Web Crawling Data Structures
- Graph Theory - Computer Vision
- Graph Theory - Recommendation Systems
- Graph Theory - Biological Networks
- Graph Theory - Social Networks
- Graph Theory - Smart Grids
- Graph Theory - Telecommunications
- Graph Theory - Knowledge Graphs
- Graph Theory - Game Theory
- Graph Theory - Urban Planning
- Graph Theory Useful Resources
- Graph Theory - Quick Guide
- Graph Theory - Useful Resources
- Graph Theory - Discussion
Graph Theory - Subgraphs
Subgraphs
In graph theory, a subgraph is a graph formed from a subset of the vertices and edges of another graph. Subgraphs plays an important role in understanding the structure and properties of larger graphs by examining their smaller, constituent parts.

Types of Subgraphs
Subgraphs can be categorized based on specific properties and constraints. Here are the main types of subgraphs −
Induced Subgraph
An induced subgraph is formed by selecting a subset of vertices from the original graph and including all the edges that connect pairs of vertices in that subset (edges that exist in the original graph).
- The induced subgraph must contain all edges between the selected vertices that are part of the original graph.
- No new edges are added; if there is an edge between two selected vertices in the original graph, it will be present in the induced subgraph.
Example
If we have a graph with vertices V = {A, B, C, D} and edges E = {(A-B), (B-C), (C-D), (A-D)}, selecting the vertices {A, B, C} will give the induced subgraph that contains edges {(A-B), (B-C)} (since those are the only edges connecting vertices in {A, B, C} in the original graph) −

Spanning Subgraph
A spanning subgraph contains all the vertices of the original graph but only a subset of its edges. It means that the spanning subgraph includes the complete set of vertices, but it does not necessarily have all the edges that were present in the original graph.
In other words:
- Vertices: All vertices of the original graph are retained.
- Edges: Some or all of the edges are removed, but the remaining edges still connect the vertices.
Example
If you have a graph with vertices V = {A, B, C, D} and edges E = {(A-B), (B-C), (C-D), (A-D)}, a spanning subgraph can be created by selecting all vertices but only a subset of edges, say E = {(A-B), (B-C)}.
The result will be a graph that still contains all the vertices {A, B, C, D}, but with fewer edges, {(A-B), (B-C)} −

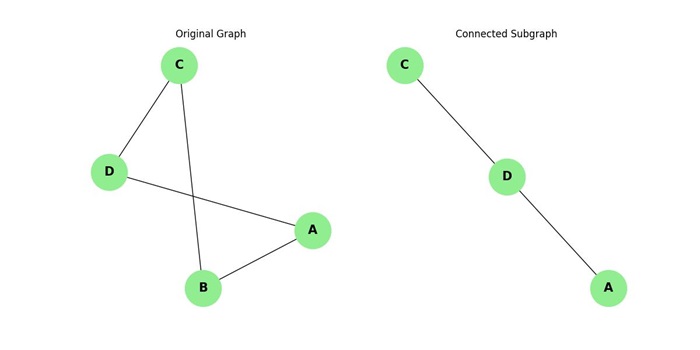
Connected Subgraph
A connected subgraph is any subgraph in which there is a path between every pair of vertices within the subgraph.
- A connected subgraph can be any subset of vertices, but the subgraph must be connected meaning, there must be a way to travel between all vertices of the subgraph using the edges in that subgraph.
- It may not contain all the edges from the original graph just the ones that maintain connectivity among the selected vertices.
Example
In the same graph with vertices V = {A, B, C, D} and edges E = {(A-B), (B-C), (C-D), (A-D)}, if you choose vertices {A, C, D}, the edges {(A-D), (C-D)} will form a connected subgraph, because there is a path between each pair of vertices in the subset −
Induced Subgraph vs. Spanning Subgraph
The main difference between an induced subgraph and a spanning subgraph is that an induced subgraph can omit vertices but must include all edges between its vertices, whereas a spanning subgraph includes all vertices but can omit edges.
Subgraph Properties
Subgraphs inherit certain properties from their parent graphs. Here are a few important properties −
Vertex and Edge Sets
The vertex set of a subgraph is a subset of the vertex set of the original graph, and the edge set of a subgraph is a subset of the edge set of the original graph.
Degree of Vertices
The degree of a vertex in a subgraph can be different from its degree in the original graph because some edges may be missing in the subgraph.
Connectivity
A connected graph may have disconnected subgraphs. However, a connected subgraph indicates a subset of vertices in which every vertex is reachable from any other vertex in the subgraph.
Paths and Cycles
Paths and cycles in the original graph may or may not exist in its subgraphs, depending on the vertices and edges included in the subgraph.
Finding Subgraphs
There are various methods and algorithms to find subgraphs within a larger graph. Here are some common techniques −
Depth-First Search (DFS)
DFS can be used to explore a graph and identify connected components, which can then be considered as subgraphs. By starting from a vertex and recursively visiting all its adjacent vertices, DFS can identify subgraphs that are connected.
Breadth-First Search (BFS)
Similar to DFS, BFS can also be used to find connected components by exploring the graph level by level. BFS is useful for finding shortest paths and identifying subgraphs in an iterative manner.
Subgraph Isomorphism
Subgraph isomorphism is a problem of finding a subgraph within a larger graph that is isomorphic (structurally identical) to another smaller graph. This is an important problem in areas like pattern recognition and network analysis.
Applications of Subgraphs
Subgraphs plays an important role in various real-world applications, they are −
Social Networks
In social network analysis, subgraphs are used to identify communities or clusters of individuals who are more closely connected to each other than to the rest of the network.
Biological Networks
In biology, subgraphs can represent functional units within larger biological networks, such as protein-protein interaction networks or metabolic pathways.
Computer Networks
In computer networks, subgraphs can be used to model sub-networks or to design and optimize network infrastructure by focusing on important subsets of nodes and connections.
Graph Algorithms
Many graph algorithms, such as those for finding the shortest path, maximum flow, or minimum spanning tree, work by examining and manipulating subgraphs of the original graph.
Example Problems Involving Subgraphs
Let us look at a few example problems that involve subgraphs −
Finding a Spanning Tree
A spanning tree is a subgraph that includes all vertices of the original graph and is a tree (a connected acyclic graph). Algorithms like Kruskal's and Prim's can find spanning trees or minimum spanning trees in weighted graphs.
Detecting Cliques
A clique is a subset of vertices such that every pair of vertices in the subset is connected by an edge. Detecting cliques involves finding subgraphs that are complete.
Identifying Communities
Community detection in graphs involves finding subgraphs where nodes are more densely connected internally than with the rest of the graph. Algorithms like Girvan-Newman and Louvain are used for this purpose.
Graph Partitioning
Graph partitioning involves dividing a graph into disjoint subgraphs such that the number of edges between subgraphs is minimized. This is used in parallel computing and network design.
Algorithms for Subgraph Detection
Several algorithms are specifically designed to detect and analyze subgraphs. Here are a few notable ones:
K-Core Decomposition
K-core decomposition identifies subgraphs where each vertex is connected to at least k other vertices within the subgraph. This helps in identifying densely connected regions.
Motif Finding
Motif finding algorithms detect recurring patterns or subgraphs within a larger graph. These motifs are important in understanding the underlying structure of the graph.
Frequent Subgraph Mining
Frequent subgraph mining algorithms, like gSpan, find subgraphs that frequently appear in a collection of graphs. This is useful in areas like chemical informatics and social network analysis.
