- Graph Theory - Home
- Graph Theory - Introduction
- Graph Theory - History
- Graph Theory - Fundamentals
- Graph Theory - Applications
- Types of Graphs
- Graph Theory - Types of Graphs
- Graph Theory - Simple Graphs
- Graph Theory - Multi-graphs
- Graph Theory - Directed Graphs
- Graph Theory - Weighted Graphs
- Graph Theory - Bipartite Graphs
- Graph Theory - Complete Graphs
- Graph Theory - Subgraphs
- Graph Theory - Trees
- Graph Theory - Forests
- Graph Theory - Planar Graphs
- Graph Theory - Hypergraphs
- Graph Theory - Infinite Graphs
- Graph Theory - Random Graphs
- Graph Representation
- Graph Theory - Graph Representation
- Graph Theory - Adjacency Matrix
- Graph Theory - Adjacency List
- Graph Theory - Incidence Matrix
- Graph Theory - Edge List
- Graph Theory - Compact Representation
- Graph Theory - Incidence Structure
- Graph Theory - Matrix-Tree Theorem
- Graph Properties
- Graph Theory - Basic Properties
- Graph Theory - Coverings
- Graph Theory - Matchings
- Graph Theory - Independent Sets
- Graph Theory - Traversability
- Graph Theory Connectivity
- Graph Theory - Connectivity
- Graph Theory - Vertex Connectivity
- Graph Theory - Edge Connectivity
- Graph Theory - k-Connected Graphs
- Graph Theory - 2-Vertex-Connected Graphs
- Graph Theory - 2-Edge-Connected Graphs
- Graph Theory - Strongly Connected Graphs
- Graph Theory - Weakly Connected Graphs
- Graph Theory - Connectivity in Planar Graphs
- Graph Theory - Connectivity in Dynamic Graphs
- Special Graphs
- Graph Theory - Regular Graphs
- Graph Theory - Complete Bipartite Graphs
- Graph Theory - Chordal Graphs
- Graph Theory - Line Graphs
- Graph Theory - Complement Graphs
- Graph Theory - Graph Products
- Graph Theory - Petersen Graph
- Graph Theory - Cayley Graphs
- Graph Theory - De Bruijn Graphs
- Graph Algorithms
- Graph Theory - Graph Algorithms
- Graph Theory - Breadth-First Search
- Graph Theory - Depth-First Search (DFS)
- Graph Theory - Dijkstra's Algorithm
- Graph Theory - Bellman-Ford Algorithm
- Graph Theory - Floyd-Warshall Algorithm
- Graph Theory - Johnson's Algorithm
- Graph Theory - A* Search Algorithm
- Graph Theory - Kruskal's Algorithm
- Graph Theory - Prim's Algorithm
- Graph Theory - Borůvka's Algorithm
- Graph Theory - Ford-Fulkerson Algorithm
- Graph Theory - Edmonds-Karp Algorithm
- Graph Theory - Push-Relabel Algorithm
- Graph Theory - Dinic's Algorithm
- Graph Theory - Hopcroft-Karp Algorithm
- Graph Theory - Tarjan's Algorithm
- Graph Theory - Kosaraju's Algorithm
- Graph Theory - Karger's Algorithm
- Graph Coloring
- Graph Theory - Coloring
- Graph Theory - Edge Coloring
- Graph Theory - Total Coloring
- Graph Theory - Greedy Coloring
- Graph Theory - Four Color Theorem
- Graph Theory - Coloring Bipartite Graphs
- Graph Theory - List Coloring
- Advanced Topics of Graph Theory
- Graph Theory - Chromatic Number
- Graph Theory - Chromatic Polynomial
- Graph Theory - Graph Labeling
- Graph Theory - Planarity & Kuratowski's Theorem
- Graph Theory - Planarity Testing Algorithms
- Graph Theory - Graph Embedding
- Graph Theory - Graph Minors
- Graph Theory - Isomorphism
- Spectral Graph Theory
- Graph Theory - Graph Laplacians
- Graph Theory - Cheeger's Inequality
- Graph Theory - Graph Clustering
- Graph Theory - Graph Partitioning
- Graph Theory - Tree Decomposition
- Graph Theory - Treewidth
- Graph Theory - Branchwidth
- Graph Theory - Graph Drawings
- Graph Theory - Force-Directed Methods
- Graph Theory - Layered Graph Drawing
- Graph Theory - Orthogonal Graph Drawing
- Graph Theory - Examples
- Computational Complexity of Graph
- Graph Theory - Time Complexity
- Graph Theory - Space Complexity
- Graph Theory - NP-Complete Problems
- Graph Theory - Approximation Algorithms
- Graph Theory - Parallel & Distributed Algorithms
- Graph Theory - Algorithm Optimization
- Graphs in Computer Science
- Graph Theory - Data Structures for Graphs
- Graph Theory - Graph Implementations
- Graph Theory - Graph Databases
- Graph Theory - Query Languages
- Graph Algorithms in Machine Learning
- Graph Neural Networks
- Graph Theory - Link Prediction
- Graph-Based Clustering
- Graph Theory - PageRank Algorithm
- Graph Theory - HITS Algorithm
- Graph Theory - Social Network Analysis
- Graph Theory - Centrality Measures
- Graph Theory - Community Detection
- Graph Theory - Influence Maximization
- Graph Theory - Graph Compression
- Graph Theory Real-World Applications
- Graph Theory - Network Routing
- Graph Theory - Traffic Flow
- Graph Theory - Web Crawling Data Structures
- Graph Theory - Computer Vision
- Graph Theory - Recommendation Systems
- Graph Theory - Biological Networks
- Graph Theory - Social Networks
- Graph Theory - Smart Grids
- Graph Theory - Telecommunications
- Graph Theory - Knowledge Graphs
- Graph Theory - Game Theory
- Graph Theory - Urban Planning
- Graph Theory Useful Resources
- Graph Theory - Quick Guide
- Graph Theory - Useful Resources
- Graph Theory - Discussion
Graph Theory - Graph Partitioning
Graph Partitioning
Graph Partitioning is a process of dividing a graph into multiple smaller, disconnected subgraphs while minimizing the number of edges between them. The main goal is to ensure that the partitions or subgraphs are balanced in terms of size or weight, and that the cuts (edges between partitions) are minimized.

The above diagram visualizes the process of graph partitioning where a large graph is split into smaller clusters or subgraphs.
Partition 1: [0, 4, 5, 7] Partition 2: [1, 2, 3, 6]
Properties of Graph Partitioning
Following are the major properties of graph partitioning −
- Minimization of Edge Cuts: The objective is to minimize the number of edges between the partitions or subgraphs, also known as the "cut" between the partitions.
- Balanced Partition Sizes: Each partition should have a similar number of nodes, which ensures fairness in the division and avoids large partitions that might cause load imbalance.
- Weight Balance: If the graph has weighted edges, the partitioning should aim to balance the total weight of edges within each partition.
Types of Graph Partitioning
There are various types of graph partitioning techniques, each with different types of graphs and optimization goals. The main types ar as follows −
- Balanced Partitioning
- Multilevel Partitioning
- Spectral Partitioning
- Geometric Partitioning
Balanced Partitioning
Balanced Partitioning is used to divide a graph or a set of elements into two or more parts such that each part has an approximately equal number of elements or is balanced in terms of certain criteria (such as weight).
The goal is to achieve an equitable distribution of data while maintaining a minimal number of connections (or edges) between the parts. In graph theory, this technique is particularly useful for dividing a graph into subgraphs that minimize the cut size the number of edges connecting different partitions.
Example
For a graph with 10 nodes, the following steps are applied −
- Start with the original graph of 12 nodes.
- Apply a partitioning algorithm to divide the graph into two equal parts, each containing 6 nodes.
- Optimize the cut between the two partitions to minimize the number of edges connecting the two parts, ensuring the partitions are balanced in terms of both size and edge cuts.
- If needed, refine the partitions by applying further adjustments, ensuring each partition is balanced while minimizing the connection between them.
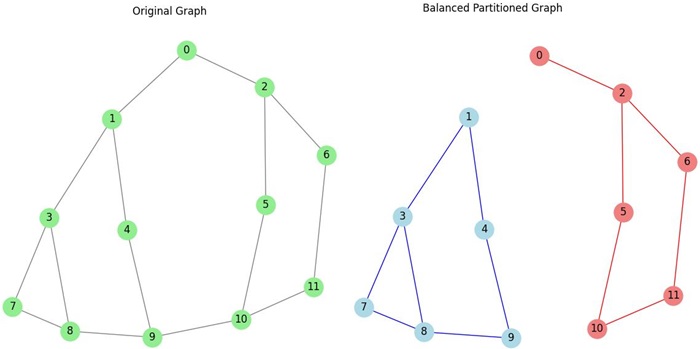
Partition 1: [1, 3, 4, 7, 8, 9] Partition 2: [0, 2, 5, 6, 10, 11]
Multilevel Partitioning
Multilevel Partitioning is used to divide a larger graph into smaller subgraphs or partitions. It works by coarsening the graph, partitioning it at a smaller scale, and then uncoarsing it back to its original size while refining the partition. Here is how it works −
- Coarsing: The original graph is iteratively reduced into smaller, more manageable graphs by collapsing vertices and edges. This results in a graph with fewer nodes and edges, making the partitioning process easier.
- Initial Partitioning: After coarsing, a partitioning algorithm is applied to the smaller graph. The goal is to divide the graph into separate partitions or clusters while minimizing the edge cuts between them.
- Uncoarsing: The coarsed graph is expanded back to the original graph by restoring the collapsed nodes and edges. As this happens, the partitions are refined, and adjustments are made to optimize the cuts between the partitions.
- Refinement: In this step, additional refinement is applied to the partition to minimize edge cuts and improve the balance of the partitions, ensuring that they are as equal as possible in terms of both size and connectivity.
Example
For a graph with 10 nodes, the following steps are applied −
- Start with the original graph and coarsen it into a smaller graph with 5 nodes.
- Apply an initial partitioning on the 5-node graph.
- Uncoarse the 5-node graph back to the original 10-node graph, and refine the partitions by optimizing the edge cuts.

Spectral Graph Partitioning
Spectral Graph Partitioning uses the eigenvalues and eigenvectors of the Laplacian matrix of a graph to partition it into clusters. This method is based on the principle that the eigenvectors of the Laplacian matrix can reveal the inherent divisions or clusters within the graph, helping to organize the graph into meaningful subsets.
In spectral partitioning, the Laplacian matrix L of a graph is computed as −
L = D - A
Where D is the degree matrix (a diagonal matrix with the degrees of the nodes) and A is the adjacency matrix of the graph.
Once the Laplacian matrix is computed, the eigenvectors corresponding to the smallest eigenvalues are found. These eigenvectors are then used to partition the graph into two or more clusters, based on their components.
Example
Consider a graph with the following adjacency matrix −
Adjacency Matrix A: [[0, 1, 1, 0, 0], [1, 0, 1, 1, 0], [1, 1, 0, 0, 0], [0, 1, 0, 0, 1], [0, 0, 0, 1, 0]]
The Laplacian matrix L is computed, and its eigenvectors are used to divide the graph into two clusters:
- Cluster 1: Nodes {0, 1, 2}
- Cluster 2: Nodes {3, 4}

Cluster 1: Nodes [0, 1, 2] Cluster 2: Nodes [3, 4]
Geometric Partitioning
Geometric Partitioning is used for dividing a graph or a set of data into smaller parts based on their geometric properties. The main idea is to partition the graph according to spatial or geometric features, often using coordinates or distances to guide the separation of the graph into regions.
In geometric partitioning,
- The nodes (vertices) of the graph represent points in a geometric space.
- The goal is to divide the graph into clusters or partitions in such a way that the edges between the partitions are minimized while maintaining the overall structure of the graph.
- Common methods for geometric partitioning include algorithms like k-means clustering or Voronoi diagrams, where the graph is partitioned based on distances, angles, or other spatial criteria.

Graph Partitioning Algorithms
We can use various algorithms to partition graphs, such as −
- Kernighan-Lin Algorithm: This algorithm improves graph partitions by swapping nodes between two groups to reduce the number of edges connecting them.
- Metis Algorithm: A multilevel algorithm that uses refinement techniques to partition large graphs. It is majorly used in parallel computing.
- Normalized Cut Algorithm: This technique splits the graph by minimizing the ratio of the edge cuts to the total connections of the groups, helping to create balanced partitions.
- Fiduccia-Mattheyses Algorithm: A practical approach for balancing partition sizes while reducing edge cuts, often used in designing circuits.
Example: Kernighan-Lin Algorithm
For a simple graph, the Kernighan-Lin algorithm starts by randomly assigning nodes to two partitions. It then iteratively swaps nodes between partitions to reduce the number of edges between them. The algorithm stops when no further improvement is possible.
