- Graph Theory - Home
- Graph Theory - Introduction
- Graph Theory - History
- Graph Theory - Fundamentals
- Graph Theory - Applications
- Types of Graphs
- Graph Theory - Types of Graphs
- Graph Theory - Simple Graphs
- Graph Theory - Multi-graphs
- Graph Theory - Directed Graphs
- Graph Theory - Weighted Graphs
- Graph Theory - Bipartite Graphs
- Graph Theory - Complete Graphs
- Graph Theory - Subgraphs
- Graph Theory - Trees
- Graph Theory - Forests
- Graph Theory - Planar Graphs
- Graph Theory - Hypergraphs
- Graph Theory - Infinite Graphs
- Graph Theory - Random Graphs
- Graph Representation
- Graph Theory - Graph Representation
- Graph Theory - Adjacency Matrix
- Graph Theory - Adjacency List
- Graph Theory - Incidence Matrix
- Graph Theory - Edge List
- Graph Theory - Compact Representation
- Graph Theory - Incidence Structure
- Graph Theory - Matrix-Tree Theorem
- Graph Properties
- Graph Theory - Basic Properties
- Graph Theory - Coverings
- Graph Theory - Matchings
- Graph Theory - Independent Sets
- Graph Theory - Traversability
- Graph Theory Connectivity
- Graph Theory - Connectivity
- Graph Theory - Vertex Connectivity
- Graph Theory - Edge Connectivity
- Graph Theory - k-Connected Graphs
- Graph Theory - 2-Vertex-Connected Graphs
- Graph Theory - 2-Edge-Connected Graphs
- Graph Theory - Strongly Connected Graphs
- Graph Theory - Weakly Connected Graphs
- Graph Theory - Connectivity in Planar Graphs
- Graph Theory - Connectivity in Dynamic Graphs
- Special Graphs
- Graph Theory - Regular Graphs
- Graph Theory - Complete Bipartite Graphs
- Graph Theory - Chordal Graphs
- Graph Theory - Line Graphs
- Graph Theory - Complement Graphs
- Graph Theory - Graph Products
- Graph Theory - Petersen Graph
- Graph Theory - Cayley Graphs
- Graph Theory - De Bruijn Graphs
- Graph Algorithms
- Graph Theory - Graph Algorithms
- Graph Theory - Breadth-First Search
- Graph Theory - Depth-First Search (DFS)
- Graph Theory - Dijkstra's Algorithm
- Graph Theory - Bellman-Ford Algorithm
- Graph Theory - Floyd-Warshall Algorithm
- Graph Theory - Johnson's Algorithm
- Graph Theory - A* Search Algorithm
- Graph Theory - Kruskal's Algorithm
- Graph Theory - Prim's Algorithm
- Graph Theory - Borůvka's Algorithm
- Graph Theory - Ford-Fulkerson Algorithm
- Graph Theory - Edmonds-Karp Algorithm
- Graph Theory - Push-Relabel Algorithm
- Graph Theory - Dinic's Algorithm
- Graph Theory - Hopcroft-Karp Algorithm
- Graph Theory - Tarjan's Algorithm
- Graph Theory - Kosaraju's Algorithm
- Graph Theory - Karger's Algorithm
- Graph Coloring
- Graph Theory - Coloring
- Graph Theory - Edge Coloring
- Graph Theory - Total Coloring
- Graph Theory - Greedy Coloring
- Graph Theory - Four Color Theorem
- Graph Theory - Coloring Bipartite Graphs
- Graph Theory - List Coloring
- Advanced Topics of Graph Theory
- Graph Theory - Chromatic Number
- Graph Theory - Chromatic Polynomial
- Graph Theory - Graph Labeling
- Graph Theory - Planarity & Kuratowski's Theorem
- Graph Theory - Planarity Testing Algorithms
- Graph Theory - Graph Embedding
- Graph Theory - Graph Minors
- Graph Theory - Isomorphism
- Spectral Graph Theory
- Graph Theory - Graph Laplacians
- Graph Theory - Cheeger's Inequality
- Graph Theory - Graph Clustering
- Graph Theory - Graph Partitioning
- Graph Theory - Tree Decomposition
- Graph Theory - Treewidth
- Graph Theory - Branchwidth
- Graph Theory - Graph Drawings
- Graph Theory - Force-Directed Methods
- Graph Theory - Layered Graph Drawing
- Graph Theory - Orthogonal Graph Drawing
- Graph Theory - Examples
- Computational Complexity of Graph
- Graph Theory - Time Complexity
- Graph Theory - Space Complexity
- Graph Theory - NP-Complete Problems
- Graph Theory - Approximation Algorithms
- Graph Theory - Parallel & Distributed Algorithms
- Graph Theory - Algorithm Optimization
- Graphs in Computer Science
- Graph Theory - Data Structures for Graphs
- Graph Theory - Graph Implementations
- Graph Theory - Graph Databases
- Graph Theory - Query Languages
- Graph Algorithms in Machine Learning
- Graph Neural Networks
- Graph Theory - Link Prediction
- Graph-Based Clustering
- Graph Theory - PageRank Algorithm
- Graph Theory - HITS Algorithm
- Graph Theory - Social Network Analysis
- Graph Theory - Centrality Measures
- Graph Theory - Community Detection
- Graph Theory - Influence Maximization
- Graph Theory - Graph Compression
- Graph Theory Real-World Applications
- Graph Theory - Network Routing
- Graph Theory - Traffic Flow
- Graph Theory - Web Crawling Data Structures
- Graph Theory - Computer Vision
- Graph Theory - Recommendation Systems
- Graph Theory - Biological Networks
- Graph Theory - Social Networks
- Graph Theory - Smart Grids
- Graph Theory - Telecommunications
- Graph Theory - Knowledge Graphs
- Graph Theory - Game Theory
- Graph Theory - Urban Planning
- Graph Theory Useful Resources
- Graph Theory - Quick Guide
- Graph Theory - Useful Resources
- Graph Theory - Discussion
Graph Theory - Planarity and Kuratowski's Theorem
Planarity in Graph Theory
Planarity in graph theory determines whether a graph can be drawn on a plane without any edges crossing each other, except at their endpoints. A graph that can be represented in this way is called a planar graph.
Planar graphs are important in many real-world applications, such as circuit design, network visualization, and geographical mapping, where minimizing edge intersections is important for clarity.
Properties of Planar Graphs
Planar graphs have specific characteristics that distinguish them from other types of graphs. These properties are used to determine the planarity of a graph −
- Face Definition: A planar graph divides the plane into regions called faces. One of these faces is the outer, unbounded region.
- Euler's Formula: For any connected planar graph, Euler's formula states that:
V - E + F = 2
Here, V is the number of vertices, E is the number of edges, and F is the number of faces. - Maximum Edges: A planar graph with n vertices can have at most 3n - 6 edges, provided n 3.
What is Kuratowski's Theorem?
Kuratowski's Theorem provides a condition to determine whether a graph is planar. According to the theorem −
A graph is planar if and only if it does not contain a subgraph that is a subdivision of K5 (complete graph on 5 vertices) or K3,3 (complete bipartite graph on 6 vertices, split into two sets of 3).
This theorem helps to identify non-planar graphs by checking for these forbidden subgraphs, even when the original graph appears more complex or has additional edges and vertices.
Understanding K5 and K3,3
To be fully familiar with Kuratowski's Theorem, it is important to understand the graphs K5 and K3,3 −
- K5: It is a complete graph with 5 vertices, where every vertex is connected to every other vertex. It is non-planar because it cannot be drawn without edge crossings.
- K3,3: A complete bipartite graph with two sets of 3 vertices, where every vertex in one set is connected to all vertices in the other set. It is also non-planar due to edge crossings.
Testing Graph Planarity
Graph planarity can be tested using various techniques, including the application of Kuratowski's Theorem. Following are the steps used −
- Check if the graph has fewer than or equal to 3n - 6 edges. If not, the graph is non-planar.
- Identify subgraphs within the graph. If any subgraph is a subdivision of K5 or K3,3, the graph is non-planar.
- Use Euler's formula to verify the relationship between vertices, edges, and faces.
Examples of Planar and Non-Planar Graphs
Following are few examples illustrating planar and non-planar graphs −
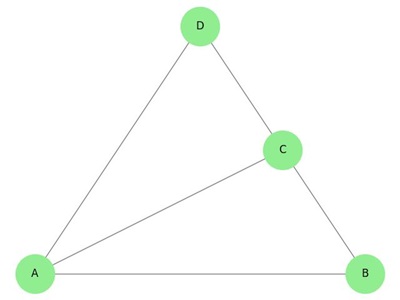
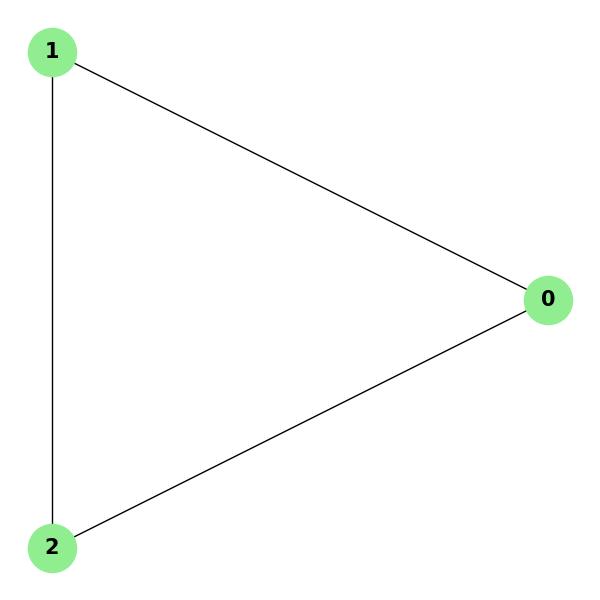
Example 1: A Planar Graph
Consider a simple triangular graph with 3 vertices and 3 edges. This graph is planar because it can be drawn on a plane without edge crossings. Additionally, Euler's formula holds −
Vertices (V): 3 Edges (E): 3 Faces (F): 2 Euler's formula: V - E + F = 3 - 3 + 2 = 2
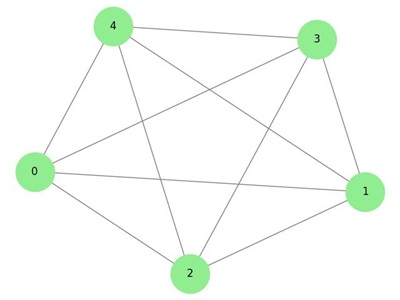
Example 2: A Non-Planar Graph (K5)
Consider the complete graph K5, where all 5 vertices are connected. This graph is non-planar because it is impossible to draw without edge crossings. Kuratowski's Theorem confirms this by identifying K5 as a forbidden subgraph.
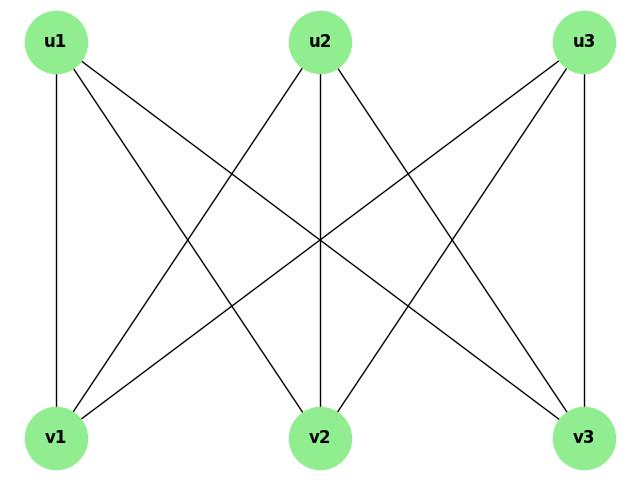
Example 3: A Non-Planar Graph (K3,3)
Consider the complete bipartite graph K3,3. It is non-planar because it cannot be drawn without edge crossings. Kuratowski's Theorem identifies K3,3 as a forbidden subgraph for planarity.
Applications of Planar Graphs
Planar graphs have several applications in various domains, they are −
- Geographical Mapping: Planar graphs are used to represent regions and boundaries in maps without overlapping edges.
- Circuit Design: In circuit design, planar graphs helps to minimize wire crossings, reducing complexity and improving efficiency.
- Network Design: Planar graphs helps in designing communication networks with minimal interference.
Challenges in Determining Planarity
While Kuratowski's Theorem provides a strong method for determining planarity, there are still several challenges to consider −
- Complex Graphs: Large and complex graphs require significant computational resources to identify subgraphs and test for planarity.
- Subdivision Recognition: Identifying subdivisions of K5 or K3,3 within a graph can be tricky, especially for more complex graph structures.
- Graph Reductions: Reducing the size of a graph for planarity testing while keeping its important features intact can be difficult.
