- Graph Theory - Home
- Graph Theory - Introduction
- Graph Theory - History
- Graph Theory - Fundamentals
- Graph Theory - Applications
- Types of Graphs
- Graph Theory - Types of Graphs
- Graph Theory - Simple Graphs
- Graph Theory - Multi-graphs
- Graph Theory - Directed Graphs
- Graph Theory - Weighted Graphs
- Graph Theory - Bipartite Graphs
- Graph Theory - Complete Graphs
- Graph Theory - Subgraphs
- Graph Theory - Trees
- Graph Theory - Forests
- Graph Theory - Planar Graphs
- Graph Theory - Hypergraphs
- Graph Theory - Infinite Graphs
- Graph Theory - Random Graphs
- Graph Representation
- Graph Theory - Graph Representation
- Graph Theory - Adjacency Matrix
- Graph Theory - Adjacency List
- Graph Theory - Incidence Matrix
- Graph Theory - Edge List
- Graph Theory - Compact Representation
- Graph Theory - Incidence Structure
- Graph Theory - Matrix-Tree Theorem
- Graph Properties
- Graph Theory - Basic Properties
- Graph Theory - Coverings
- Graph Theory - Matchings
- Graph Theory - Independent Sets
- Graph Theory - Traversability
- Graph Theory Connectivity
- Graph Theory - Connectivity
- Graph Theory - Vertex Connectivity
- Graph Theory - Edge Connectivity
- Graph Theory - k-Connected Graphs
- Graph Theory - 2-Vertex-Connected Graphs
- Graph Theory - 2-Edge-Connected Graphs
- Graph Theory - Strongly Connected Graphs
- Graph Theory - Weakly Connected Graphs
- Graph Theory - Connectivity in Planar Graphs
- Graph Theory - Connectivity in Dynamic Graphs
- Special Graphs
- Graph Theory - Regular Graphs
- Graph Theory - Complete Bipartite Graphs
- Graph Theory - Chordal Graphs
- Graph Theory - Line Graphs
- Graph Theory - Complement Graphs
- Graph Theory - Graph Products
- Graph Theory - Petersen Graph
- Graph Theory - Cayley Graphs
- Graph Theory - De Bruijn Graphs
- Graph Algorithms
- Graph Theory - Graph Algorithms
- Graph Theory - Breadth-First Search
- Graph Theory - Depth-First Search (DFS)
- Graph Theory - Dijkstra's Algorithm
- Graph Theory - Bellman-Ford Algorithm
- Graph Theory - Floyd-Warshall Algorithm
- Graph Theory - Johnson's Algorithm
- Graph Theory - A* Search Algorithm
- Graph Theory - Kruskal's Algorithm
- Graph Theory - Prim's Algorithm
- Graph Theory - Borůvka's Algorithm
- Graph Theory - Ford-Fulkerson Algorithm
- Graph Theory - Edmonds-Karp Algorithm
- Graph Theory - Push-Relabel Algorithm
- Graph Theory - Dinic's Algorithm
- Graph Theory - Hopcroft-Karp Algorithm
- Graph Theory - Tarjan's Algorithm
- Graph Theory - Kosaraju's Algorithm
- Graph Theory - Karger's Algorithm
- Graph Coloring
- Graph Theory - Coloring
- Graph Theory - Edge Coloring
- Graph Theory - Total Coloring
- Graph Theory - Greedy Coloring
- Graph Theory - Four Color Theorem
- Graph Theory - Coloring Bipartite Graphs
- Graph Theory - List Coloring
- Advanced Topics of Graph Theory
- Graph Theory - Chromatic Number
- Graph Theory - Chromatic Polynomial
- Graph Theory - Graph Labeling
- Graph Theory - Planarity & Kuratowski's Theorem
- Graph Theory - Planarity Testing Algorithms
- Graph Theory - Graph Embedding
- Graph Theory - Graph Minors
- Graph Theory - Isomorphism
- Spectral Graph Theory
- Graph Theory - Graph Laplacians
- Graph Theory - Cheeger's Inequality
- Graph Theory - Graph Clustering
- Graph Theory - Graph Partitioning
- Graph Theory - Tree Decomposition
- Graph Theory - Treewidth
- Graph Theory - Branchwidth
- Graph Theory - Graph Drawings
- Graph Theory - Force-Directed Methods
- Graph Theory - Layered Graph Drawing
- Graph Theory - Orthogonal Graph Drawing
- Graph Theory - Examples
- Computational Complexity of Graph
- Graph Theory - Time Complexity
- Graph Theory - Space Complexity
- Graph Theory - NP-Complete Problems
- Graph Theory - Approximation Algorithms
- Graph Theory - Parallel & Distributed Algorithms
- Graph Theory - Algorithm Optimization
- Graphs in Computer Science
- Graph Theory - Data Structures for Graphs
- Graph Theory - Graph Implementations
- Graph Theory - Graph Databases
- Graph Theory - Query Languages
- Graph Algorithms in Machine Learning
- Graph Neural Networks
- Graph Theory - Link Prediction
- Graph-Based Clustering
- Graph Theory - PageRank Algorithm
- Graph Theory - HITS Algorithm
- Graph Theory - Social Network Analysis
- Graph Theory - Centrality Measures
- Graph Theory - Community Detection
- Graph Theory - Influence Maximization
- Graph Theory - Graph Compression
- Graph Theory Real-World Applications
- Graph Theory - Network Routing
- Graph Theory - Traffic Flow
- Graph Theory - Web Crawling Data Structures
- Graph Theory - Computer Vision
- Graph Theory - Recommendation Systems
- Graph Theory - Biological Networks
- Graph Theory - Social Networks
- Graph Theory - Smart Grids
- Graph Theory - Telecommunications
- Graph Theory - Knowledge Graphs
- Graph Theory - Game Theory
- Graph Theory - Urban Planning
- Graph Theory Useful Resources
- Graph Theory - Quick Guide
- Graph Theory - Useful Resources
- Graph Theory - Discussion
Graph Theory - Graph Representation
Graph Representation
Graph representation refers to the way a graph is stored and organized in a computer's memory. Since graphs consist of vertices (nodes) and edges (connections between nodes), representing them is important for performing graph-related operations like searching, traversing, or finding the shortest path.
There are three major types of graph representations, each with its own advantages and use cases −
- Adjacency Matrix: A 2D array used to represent the graph where each element indicates whether an edge exists between two vertices.
- Adjacency List: A collection of lists or arrays where each list contains the neighbors of a particular vertex (i.e., the vertices it is connected to).
- Edge List: A collection of all edges in the graph, where each edge is represented by a pair or tuple of vertices.
The choice of graph representation depends on factors such as the size of the graph, the density of edges, and the types of operations that need to be performed.
Adjacency Matrix
An adjacency matrix is a 2D array that is used to represent a graph, where the rows and columns represent the vertices. The element at the intersection of a row and column represents whether there is an edge between the two corresponding vertices.
For a graph with n vertices, the adjacency matrix is a square matrix of size n x n. If there is an edge between vertex i and vertex j, the element at matrix[i][j] is 1; otherwise, it is 0.
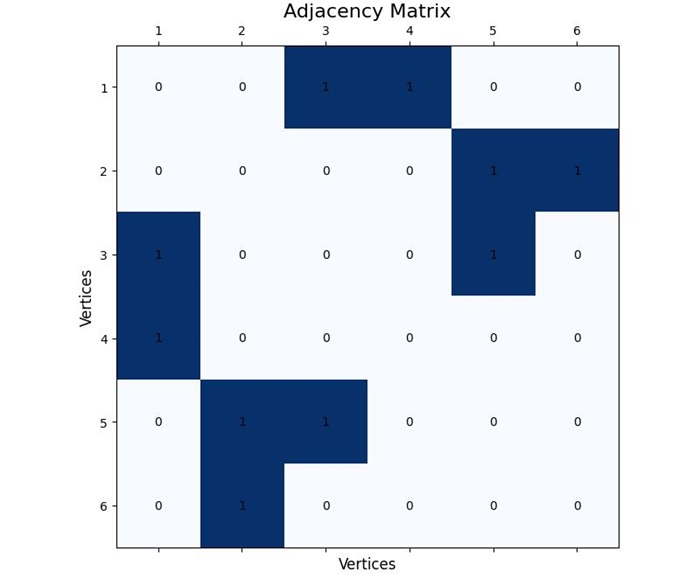
Adjacency Matrix: [[0 0 1 1 0 0] [0 0 0 0 1 1] [1 0 0 0 1 0] [1 0 0 0 0 0] [0 1 1 0 0 0] [0 1 0 0 0 0]]
Properties of Adjacency Matrix
Following are the basic properties of adjacency matrix −
- Space Complexity: O(n), where n is the number of vertices in the graph.
- Edge Lookup: Checking for an edge between two vertices is O(1), as it is a direct lookup in the matrix.
- Memory Usage: It is memory inefficient for sparse graphs, as it always uses space for all possible edges, even if many are missing.
For instance, for an undirected graph with vertices V = {A, B, C} and edges {A-B, A-C}, the adjacency matrix would be −
A B C
A 0 1 1
B 1 0 0
C 1 0 0
Adjacency List
An adjacency list is a collection of lists or arrays where each list stores the neighbors of a specific vertex. Each vertex has its own list, and the list contains the vertices that it is connected to via edges.
This representation is more space-efficient for sparse graphs, as it only stores the edges that actually exist in the graph.
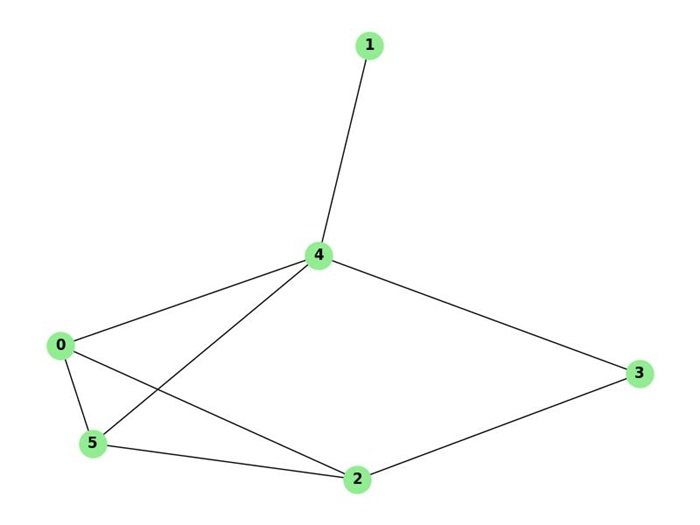
The adjacency lists for this graph is as follows −
Adjacency List Representation: Node 0: [2, 4, 5] Node 1: [4] Node 2: [0, 3, 5] Node 3: [2, 4] Node 4: [0, 1, 3, 5] Node 5: [0, 2, 4]
Properties of Adjacency List
Following are the basic properties of adjacency list −
- Space Complexity: O(V + E), where V is the number of vertices and E is the number of edges in the graph.
- Edge Lookup: Finding the neighbors of a vertex is O(degree of vertex), as we need to scan through the list.
- Memory Usage: More memory efficient for sparse graphs compared to the adjacency matrix.
For instance, for the same graph V = {A, B, C} with edges {A-B, A-C}, the adjacency list would be −
A -> B, C B -> A C -> A
Edge List
An edge list is simply a list or collection of all the edges in a graph. Each edge is represented as a pair (or tuple) of vertices that it connects. This representation is useful for algorithms that primarily focus on the edges rather than the structure of the graph.
The edge list is typically used in problems that involve a list of edges without the need for vertex-to-vertex lookups.
Properties of Edge List
Following are the basic properties of edge list −
- Space Complexity: O(E), where E is the number of edges in the graph.
- Edge Lookup: To check if an edge exists, you would need to scan the list, making it an O(E) operation.
- Memory Usage: Efficient in terms of space when the number of edges is small or the graph is sparse.
For instance, for the same graph V = {A, B, C} with edges {A-B, A-C}, the edge list would be −
(A, B), (A, C)
Weighted Graph
Graphs can also be weighted, meaning that each edge carries a weight or value, which can represent distance, cost, or any other metric. Weighted graphs can be represented using any of the previous methods with an additional step to store the edge weights.

Adjacency Matrix for Weighted Graphs
In a weighted graph, the adjacency matrix stores the weights instead of just 1 or 0. The element matrix[i][j] will store the weight of the edge between vertices i and j, or infinity () if no edge exists.
For instance, for a weighted undirected graph with vertices V = {A, B, C} and edges {A-B: 5, A-C: 3}, the weighted adjacency matrix would be −
A B C
A 0 5 3
B 5 0
C 3 0
Adjacency List for Weighted Graphs
In a weighted adjacency list, each list entry not only contains the neighboring vertices but also the weight of the edge. Each vertex has a list of pairs, where each pair consists of a neighboring vertex and the weight of the edge.
For the same weighted graph, the adjacency list would be −
A -> (B, 5), (C, 3) B -> (A, 5) C -> (A, 3)
Edge List for Weighted Graphs
In the edge list representation for weighted graphs, each edge is represented as a tuple containing two vertices and the weight of the edge between them.
For the same weighted graph, the edge list would be −
(A, B, 5), (A, C, 3)
Graph Representation for Directed Graphs
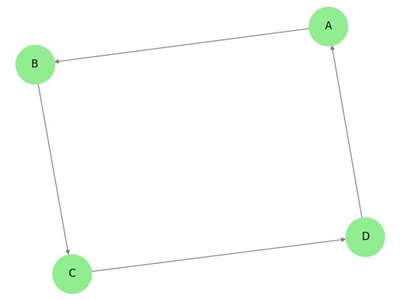
In directed graphs, the edges have a direction. This means that an edge from vertex A to vertex B is not necessarily the same as an edge from vertex B to vertex A. Directed graphs can be represented using any of the methods discussed above, with attention to the direction of the edges.
Adjacency Matrix for Directed Graphs
In the adjacency matrix for directed graphs, the element matrix[i][j] is 1 if there is a directed edge from vertex i to vertex j, and 0 if there is no such edge.
For instance, for a directed graph with vertices V = {A, B, C} and edges {A->B, A->C}, the adjacency matrix would be −
A B C
A 0 1 1
B 0 0 0
C 0 0 0
Adjacency List for Directed Graphs
In the adjacency list for directed graphs, each vertex's list contains only its outgoing edges, i.e., vertices that it has a directed edge to.
For the same directed graph, the adjacency list would be −
A -> B, C B -> C ->
Edge List for Directed Graphs
In the edge list for directed graphs, each edge is a directed pair of vertices. The edge (A, B) means there is an edge from vertex A to vertex B.
For the same directed graph, the edge list would be −
(A, B), (A, C)
Comparing Graph Representations
Each graph representation has its own advantages and drawbacks. The following table summarizes the strengths and weaknesses of each representation −
| Representation | Space Complexity | Edge Lookup | Edge Insertion |
| Adjacency Matrix | O(n) | O(1) | O(1) |
| Adjacency List | O(V + E) | O(degree of vertex) | O(1) |
| Edge List | O(E) | O(E) | O(1) |
