- Signals & Systems Home
- Signals & Systems Overview
- Introduction
- Signals Basic Types
- Signals Classification
- Signals Basic Operations
- Systems Classification
- Types of Signals
- Representation of a Discrete Time Signal
- Continuous-Time Vs Discrete-Time Sinusoidal Signal
- Even and Odd Signals
- Properties of Even and Odd Signals
- Periodic and Aperiodic Signals
- Unit Step Signal
- Unit Ramp Signal
- Unit Parabolic Signal
- Energy Spectral Density
- Unit Impulse Signal
- Power Spectral Density
- Properties of Discrete Time Unit Impulse Signal
- Real and Complex Exponential Signals
- Addition and Subtraction of Signals
- Amplitude Scaling of Signals
- Multiplication of Signals
- Time Scaling of Signals
- Time Shifting Operation on Signals
- Time Reversal Operation on Signals
- Even and Odd Components of a Signal
- Energy and Power Signals
- Power of an Energy Signal over Infinite Time
- Energy of a Power Signal over Infinite Time
- Causal, Non-Causal, and Anti-Causal Signals
- Rectangular, Triangular, Signum, Sinc, and Gaussian Functions
- Signals Analysis
- Types of Systems
- What is a Linear System?
- Time Variant and Time-Invariant Systems
- Linear and Non-Linear Systems
- Static and Dynamic System
- Causal and Non-Causal System
- Stable and Unstable System
- Invertible and Non-Invertible Systems
- Linear Time-Invariant Systems
- Transfer Function of LTI System
- Properties of LTI Systems
- Response of LTI System
- Fourier Series
- Fourier Series
- Fourier Series Representation of Periodic Signals
- Fourier Series Types
- Trigonometric Fourier Series Coefficients
- Exponential Fourier Series Coefficients
- Complex Exponential Fourier Series
- Relation between Trigonometric & Exponential Fourier Series
- Fourier Series Properties
- Properties of Continuous-Time Fourier Series
- Time Differentiation and Integration Properties of Continuous-Time Fourier Series
- Time Shifting, Time Reversal, and Time Scaling Properties of Continuous-Time Fourier Series
- Linearity and Conjugation Property of Continuous-Time Fourier Series
- Multiplication or Modulation Property of Continuous-Time Fourier Series
- Convolution Property of Continuous-Time Fourier Series
- Convolution Property of Fourier Transform
- Parseval’s Theorem in Continuous Time Fourier Series
- Average Power Calculations of Periodic Functions Using Fourier Series
- GIBBS Phenomenon for Fourier Series
- Fourier Cosine Series
- Trigonometric Fourier Series
- Derivation of Fourier Transform from Fourier Series
- Difference between Fourier Series and Fourier Transform
- Wave Symmetry
- Even Symmetry
- Odd Symmetry
- Half Wave Symmetry
- Quarter Wave Symmetry
- Fourier Transform
- Fourier Transforms
- Fourier Transforms Properties
- Fourier Transform – Representation and Condition for Existence
- Properties of Continuous-Time Fourier Transform
- Table of Fourier Transform Pairs
- Linearity and Frequency Shifting Property of Fourier Transform
- Modulation Property of Fourier Transform
- Time-Shifting Property of Fourier Transform
- Time-Reversal Property of Fourier Transform
- Time Scaling Property of Fourier Transform
- Time Differentiation Property of Fourier Transform
- Time Integration Property of Fourier Transform
- Frequency Derivative Property of Fourier Transform
- Parseval’s Theorem & Parseval’s Identity of Fourier Transform
- Fourier Transform of Complex and Real Functions
- Fourier Transform of a Gaussian Signal
- Fourier Transform of a Triangular Pulse
- Fourier Transform of Rectangular Function
- Fourier Transform of Signum Function
- Fourier Transform of Unit Impulse Function
- Fourier Transform of Unit Step Function
- Fourier Transform of Single-Sided Real Exponential Functions
- Fourier Transform of Two-Sided Real Exponential Functions
- Fourier Transform of the Sine and Cosine Functions
- Fourier Transform of Periodic Signals
- Conjugation and Autocorrelation Property of Fourier Transform
- Duality Property of Fourier Transform
- Analysis of LTI System with Fourier Transform
- Relation between Discrete-Time Fourier Transform and Z Transform
- Convolution and Correlation
- Convolution in Signals and Systems
- Convolution and Correlation
- Correlation in Signals and Systems
- System Bandwidth vs Signal Bandwidth
- Time Convolution Theorem
- Frequency Convolution Theorem
- Energy Spectral Density and Autocorrelation Function
- Autocorrelation Function of a Signal
- Cross Correlation Function and its Properties
- Detection of Periodic Signals in the Presence of Noise (by Autocorrelation)
- Detection of Periodic Signals in the Presence of Noise (by Cross-Correlation)
- Autocorrelation Function and its Properties
- PSD and Autocorrelation Function
- Sampling
- Signals Sampling Theorem
- Nyquist Rate and Nyquist Interval
- Signals Sampling Techniques
- Effects of Undersampling (Aliasing) and Anti Aliasing Filter
- Different Types of Sampling Techniques
- Laplace Transform
- Laplace Transforms
- Common Laplace Transform Pairs
- Laplace Transform of Unit Impulse Function and Unit Step Function
- Laplace Transform of Sine and Cosine Functions
- Laplace Transform of Real Exponential and Complex Exponential Functions
- Laplace Transform of Ramp Function and Parabolic Function
- Laplace Transform of Damped Sine and Cosine Functions
- Laplace Transform of Damped Hyperbolic Sine and Cosine Functions
- Laplace Transform of Periodic Functions
- Laplace Transform of Rectifier Function
- Laplace Transforms Properties
- Linearity Property of Laplace Transform
- Time Shifting Property of Laplace Transform
- Time Scaling and Frequency Shifting Properties of Laplace Transform
- Time Differentiation Property of Laplace Transform
- Time Integration Property of Laplace Transform
- Time Convolution and Multiplication Properties of Laplace Transform
- Initial Value Theorem of Laplace Transform
- Final Value Theorem of Laplace Transform
- Parseval's Theorem for Laplace Transform
- Laplace Transform and Region of Convergence for right sided and left sided signals
- Laplace Transform and Region of Convergence of Two Sided and Finite Duration Signals
- Circuit Analysis with Laplace Transform
- Step Response and Impulse Response of Series RL Circuit using Laplace Transform
- Step Response and Impulse Response of Series RC Circuit using Laplace Transform
- Step Response of Series RLC Circuit using Laplace Transform
- Solving Differential Equations with Laplace Transform
- Difference between Laplace Transform and Fourier Transform
- Difference between Z Transform and Laplace Transform
- Relation between Laplace Transform and Z-Transform
- Relation between Laplace Transform and Fourier Transform
- Laplace Transform – Time Reversal, Conjugation, and Conjugate Symmetry Properties
- Laplace Transform – Differentiation in s Domain
- Laplace Transform – Conditions for Existence, Region of Convergence, Merits & Demerits
- Z Transform
- Z-Transforms (ZT)
- Common Z-Transform Pairs
- Z-Transform of Unit Impulse, Unit Step, and Unit Ramp Functions
- Z-Transform of Sine and Cosine Signals
- Z-Transform of Exponential Functions
- Z-Transforms Properties
- Properties of ROC of the Z-Transform
- Z-Transform and ROC of Finite Duration Sequences
- Conjugation and Accumulation Properties of Z-Transform
- Time Shifting Property of Z Transform
- Time Reversal Property of Z Transform
- Time Expansion Property of Z Transform
- Differentiation in z Domain Property of Z Transform
- Initial Value Theorem of Z-Transform
- Final Value Theorem of Z Transform
- Solution of Difference Equations Using Z Transform
- Long Division Method to Find Inverse Z Transform
- Partial Fraction Expansion Method for Inverse Z-Transform
- What is Inverse Z Transform?
- Inverse Z-Transform by Convolution Method
- Transform Analysis of LTI Systems using Z-Transform
- Convolution Property of Z Transform
- Correlation Property of Z Transform
- Multiplication by Exponential Sequence Property of Z Transform
- Multiplication Property of Z Transform
- Residue Method to Calculate Inverse Z Transform
- System Realization
- Cascade Form Realization of Continuous-Time Systems
- Direct Form-I Realization of Continuous-Time Systems
- Direct Form-II Realization of Continuous-Time Systems
- Parallel Form Realization of Continuous-Time Systems
- Causality and Paley Wiener Criterion for Physical Realization
- Discrete Fourier Transform
- Discrete-Time Fourier Transform
- Properties of Discrete Time Fourier Transform
- Linearity, Periodicity, and Symmetry Properties of Discrete-Time Fourier Transform
- Time Shifting and Frequency Shifting Properties of Discrete Time Fourier Transform
- Inverse Discrete-Time Fourier Transform
- Time Convolution and Frequency Convolution Properties of Discrete-Time Fourier Transform
- Differentiation in Frequency Domain Property of Discrete Time Fourier Transform
- Parseval’s Power Theorem
- Miscellaneous Concepts
- What is Mean Square Error?
- What is Fourier Spectrum?
- Region of Convergence
- Hilbert Transform
- Properties of Hilbert Transform
- Symmetric Impulse Response of Linear-Phase System
- Filter Characteristics of Linear Systems
- Characteristics of an Ideal Filter (LPF, HPF, BPF, and BRF)
- Zero Order Hold and its Transfer Function
- What is Ideal Reconstruction Filter?
- What is the Frequency Response of Discrete Time Systems?
- Basic Elements to Construct the Block Diagram of Continuous Time Systems
- BIBO Stability Criterion
- BIBO Stability of Discrete-Time Systems
- Distortion Less Transmission
- Distortionless Transmission through a System
- Rayleigh’s Energy Theorem
Zero-Order Hold and its Transfer Function (Practical Reconstruction)
Data Reconstruction
The data reconstruction is defined as the process of obtaining the analog signal x(t) from the sampled signal $\mathrm{x_{s}(t)}$. The data reconstruction is also known as interpolation.
The sampled signal is given by,
$$\mathrm{x_{s}(t) \:=\: x(t)\sum_{n=-\infty}^{\infty}\:\delta(t\:-\:nT)}$$
$$\mathrm{\Rightarrow\: x_{s}(t) \:=\: \sum_{n=-\infty}^{\infty}\:x(nT)\delta(t\:-\:nT)}$$
Where, $\mathrm{\delta(t\:-\:nT)}$ is zero except at the instants $\mathrm{t\:=\:nT}$. A reconstruction filter which is assumed to be linear and time invariant has unit impulse response h(t). The output of the reconstruction filter is given by the convolution as,
$$\mathrm{y(t) \:=\: \int_{-\infty}^{\infty}\sum_{n=-\infty}^{\infty}\:x(nT)\delta(k\:-\:nT)h(t\:-\:k)dk}$$
By rearranging the order of integration and summation, we get,
$$\mathrm{y(t) \:=\: \sum_{n =-\infty}^{\infty}\:x(nT)\int_{-\infty}^{\infty}\:\delta(k\:-\:nT)h(t\:-\:k)dk}$$
$$\mathrm{\therefore\: y(t) \:=\: \sum_{n=-\infty}^{\infty}\:x(nT)h(t\:-\:nT)}$$
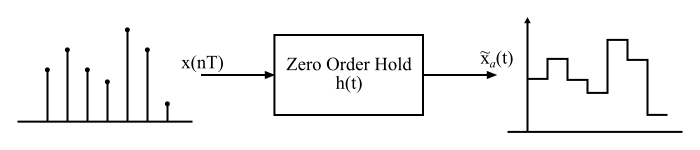
What is Zero-Order Hold?
The zero-order hold is a method which is widely used to reconstruct the signals in real time. In the zero-order hold reconstruction method, the continuous signal is reconstructed from its samples by holding the given sample for an interval until the next sample is received. Therefore, the zero-order hold generates the step approximations.
The process of reconstruction by zero-order hold is shown in the figure.
Mathematically, the output of the zero-order hold is given by,
$$\mathrm{\tilde{x}_{a}(t)\:=\:x(n)\:;\: \: for \: nT\:\leq\: n\:\leq \: ( n \: +\: 1 )T }$$
Therefore,
$$\mathrm{\tilde{x}_{a}(t) \:=\: x(0)\: ; \:\: for \: 0\:\leq\: t\:\leq\: T }$$
$$\mathrm{\tilde{x}_{a}(t) \:=\: x(T)\: ; \:\: for \: T\:\leq\: t\:\leq\: 2T}$$
$$\mathrm{\tilde{x}_{a}(t) \:=\: x(2T)\:; \:\: for \: 2T\:\leq\: t\:\leq\: 3T\: \:and\: so\: on}$$
Also, the impulse response of the zero-order hold is given by,
$$\mathrm{h(t)\:=\: \begin{cases} 1\:\: ;\:\:for\:\: 0\:\leq\: t\:\leq\: T \\\\ 0\:\:; otherwise \ \end{cases} }$$
Transfer Function of Zero-Order Hold
The output $\mathrm{\tilde{x}_{a}(t)}$ of a zero-order hold is given by the convolution of its impulse response h(t) and its input $\mathrm{x(nT)}$, i.e.,
$$\mathrm{\tilde{x}_{a}(t) \:=\: x(nT)\:\cdot\: h(t)}$$
$$\mathrm{\Rightarrow\: \tilde{x}_{a}(t) \:=\: \sum_{n=-\infty}^{\infty}\:x(nT)h(t \:-\: nT)}$$
Since the impulse response of the zero-order hold is given by,
$$\mathrm{h(t) \:=\: u(t) \:-\: u(t \:-\: T)}$$
$$\mathrm{\Rightarrow\: h(t\:-\:nT) \:=\: u(t \:-\:nT)\:-\:u\left [ t \:-\: (n \:+\: 1)T \right ]}$$
$$\mathrm{\therefore\: \tilde{x}_{a}(t) \:=\: \sum_{n=-\infty}^{\infty}\:x(nT)\left\{ u(t\:-\:nT)\:-\:u[t\:-\:(n \: +\: 1 )T]\right\}}$$
By taking Laplace transform on both sides, we get,
$$\mathrm{L[\tilde{x}_{a}(t)]\:=\: L\left[\sum_{n=-\infty}^{\infty}\:x(nT)\{u(t\:-\:nT)\:-\:u[t\:-\:(n\:+\:1)T] \} \right ]}$$
$$\mathrm{\tilde{X}_{a}(s)\:=\:\sum_{n=-\infty}^{\infty}\:x(nT)\left [ \frac{e^{-nTs}}{s}\:-\:\frac{e^{-(n\:+\:1)Ts}}{s} \right ]\:=\:\left(\frac{1\:-\:e^{-Ts}}{s}\right)\sum_{n=-\infty}^{\infty}\:x(nT)e^{-nTs}}$$
$$\mathrm{\Rightarrow\: \tilde{X}_{a}(s)\:=\:\left (\frac{1\:-\:e^{-Ts}}{s} \right)X^{\ast}(s)}$$
Therefore, the transfer function of the zero-order hold is given by,
$$\mathrm{TF\:=\:\frac{\tilde{X}_{a}(s)}{X^{\ast}(s)}\:=\:\left(\frac{1\:-\:e^{-Ts}}{s} \right)}$$
The output of the zero order hold consists of higher order harmonics because it consists of steps. These harmonics can be removed by applying the output of ZOH to a low pass filter. This LPF tends to smooth the corners on the step approximations generated by the zero order hold. Thus, this LPF is also known as smoothing filter.
