- Digital Image Processing
- DIP - Home
- DIP - Image Processing Introduction
- DIP - Signal and System Introduction
- DIP - History of Photography
- DIP - Applications and Usage
- DIP - Concept of Dimensions
- DIP - Image Formation on Camera
- DIP - Camera Mechanism
- DIP - Concept of Pixel
- DIP - Perspective Transformation
- DIP - Concept of Bits Per Pixel
- DIP - Types of Images
- DIP - Color Codes Conversion
- DIP - Grayscale to RGB Conversion
- DIP - Concept of Sampling
- DIP - Pixel Resolution
- DIP - Concept of Zooming
- DIP - Zooming methods
- DIP - Spatial Resolution
- DIP - Pixels Dots and Lines per inch
- DIP - Gray Level Resolution
- DIP - Concept of Quantization
- DIP - ISO Preference curves
- DIP - Concept of Dithering
- DIP - Histograms Introduction
- DIP - Brightness and Contrast
- DIP - Image Transformations
- DIP - Histogram Sliding
- DIP - Histogram Stretching
- DIP - Introduction to Probability
- DIP - Histogram Equalization
- DIP - Gray Level Transformations
- DIP - Concept of convolution
- DIP - Concept of Masks
- DIP - Concept of Blurring
- DIP - Concept of Edge Detection
- DIP - Prewitt Operator
- DIP - Sobel operator
- DIP - Robinson Compass Mask
- DIP - Krisch Compass Mask
- DIP - Laplacian Operator
- DIP - Frequency Domain Analysis
- DIP - Fourier series and Transform
- DIP - Convolution theorm
- DIP - High Pass vs Low Pass Filters
- DIP - Introduction to Color Spaces
- DIP - JPEG compression
- DIP - Optical Character Recognition
- DIP - Computer Vision and Graphics
- DIP Useful Resources
- DIP - Quick Guide
- DIP - Useful Resources
- DIP - Discussion
Perspective Transformation
When human eyes see near things they look bigger as compare to those who are far away. This is called perspective in a general way. Whereas transformation is the transfer of an object e.t.c from one state to another.
So overall, the perspective transformation deals with the conversion of 3d world into 2d image. The same principle on which human vision works and the same principle on which the camera works.
We will see in detail about why this happens, that those objects which are near to you look bigger, while those who are far away, look smaller even though they look bigger when you reach them.
We will start this discussion by the concept of frame of reference:
Frame of reference:
Frame of reference is basically a set of values in relation to which we measure something.
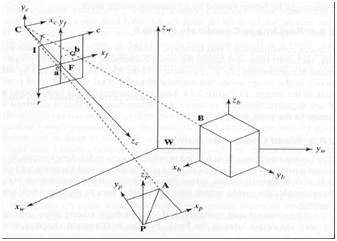
5 frames of reference
In order to analyze a 3d world/image/scene, 5 different frame of references are required.
- Object
- World
- Camera
- Image
- Pixel
Object coordinate frame
Object coordinate frame is used for modeling objects. For example, checking if a particular object is in a proper place with respect to the other object. It is a 3d coordinate system.
World coordinate frame
World coordinate frame is used for co-relating objects in a 3 dimensional world. It is a 3d coordinate system.
Camera coordinate frame
Camera co-ordinate frame is used to relate objects with respect of the camera. It is a 3d coordinate system.
Image coordinate frame
It is not a 3d coordinate system, rather it is a 2d system. It is used to describe how 3d points are mapped in a 2d image plane.
Pixel coordinate frame
It is also a 2d coordinate system. Each pixel has a value of pixel co ordinates.
Transformation between these 5 frames
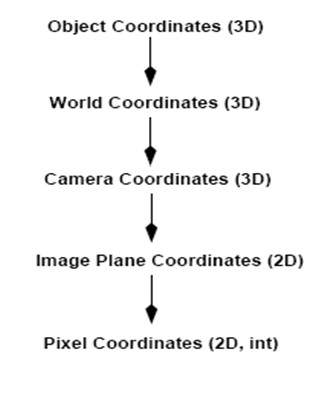
Thats how a 3d scene is transformed into 2d, with image of pixels.
Now we will explain this concept mathematically.
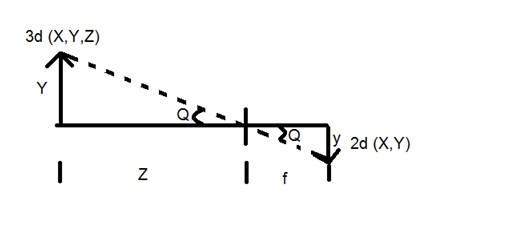
Where
Y = 3d object
y = 2d Image
f = focal length of the camera
Z = distance between object and the camera
Now there are two different angles formed in this transform which are represented by Q.
The first angle is
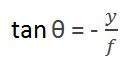
Where minus denotes that image is inverted. The second angle that is formed is:
Comparing these two equations we get
From this equation, we can see that when the rays of light reflect back after striking from the object, passed from the camera, an invert image is formed.
We can better understand this, with this example.
For example
Calculating the size of image formed
Suppose an image has been taken of a person 5m tall, and standing at a distance of 50m from the camera, and we have to tell that what is the size of the image of the person, with a camera of focal length is 50mm.
Solution:
Since the focal length is in millimeter, so we have to convert every thing in millimeter in order to calculate it.
So,
Y = 5000 mm.
f = 50 mm.
Z = 50000 mm.
Putting the values in the formula, we get

= -5 mm.
Again, the minus sign indicates that the image is inverted.