- DSP - Home
- DSP - Signals-Definition
- DSP - Basic CT Signals
- DSP - Basic DT Signals
- DSP - Classification of CT Signals
- DSP - Classification of DT Signals
- DSP - Miscellaneous Signals
- Operations Signals - Shifting
- Operations Signals - Scaling
- Operations Signals - Reversal
- Operations Signals - Differentiation
- Operations Signals - Integration
- Operations Signals - Convolution
- Basic System Properties
- DSP - Static Systems
- DSP - Dynamic Systems
- DSP - Causal Systems
- DSP - Non-Causal Systems
- DSP - Anti-Causal Systems
- DSP - Linear Systems
- DSP - Non-Linear Systems
- DSP - Time-Invariant Systems
- DSP - Time-Variant Systems
- DSP - Stable Systems
- DSP - Unstable Systems
- DSP - Solved Examples
- Z-Transform
- Z-Transform - Introduction
- Z-Transform - Properties
- Z-Transform - Existence
- Z-Transform - Inverse
- Z-Transform - Solved Examples
- Discrete Fourier Transform
- DFT - Introduction
- DFT - Time Frequency Transform
- DTF - Circular Convolution
- DFT - Linear Filtering
- DFT - Sectional Convolution
- DFT - Discrete Cosine Transform
- DFT - Solved Examples
- Fast Fourier Transform
- DSP - Fast Fourier Transform
- DSP - In-Place Computation
- DSP - Computer Aided Design
- Digital Signal Processing Resources
- DSP - Quick Guide
- DSP - Useful Resources
- DSP - Discussion
DSP - Z-Transform Properties
In this chapter, we will understand the basic properties of Z-transforms.
Linearity
It states that when two or more individual discrete signals are multiplied by constants, their respective Z-transforms will also be multiplied by the same constants.
Mathematically,
$$a_1x_1(n)+a_2x_2(n) = a_1X_1(z)+a_2X_2(z)$$Proof − We know that,
$$X(Z) = \sum_{n=-\infty}^\infty x(n)Z^{-n}$$$= \sum_{n=-\infty}^\infty (a_1x_1(n)+a_2x_2(n))Z^{-n}$
$= a_1\sum_{n = -\infty}^\infty x_1(n)Z^{-n}+a_2\sum_{n = -\infty}^\infty x_2(n)Z^{-n}$
$= a_1X_1(z)+a_2X_2(z)$ (Hence Proved)
Here, the ROC is $ROC_1\bigcap ROC_2$.
Time Shifting
Time shifting property depicts how the change in the time domain in the discrete signal will affect the Z-domain, which can be written as;
$$x(n-n_0)\longleftrightarrow X(Z)Z^{-n}$$Or $x(n-1)\longleftrightarrow Z^{-1}X(Z)$
Proof −
Let $y(P) = X(P-K)$
$Y(z) = \sum_{p = -\infty}^\infty y(p)Z^{-p}$
$= \sum_{p = -\infty}^\infty (x(p-k))Z^{-p}$
Let s = p-k
$= \sum_{s = -\infty}^\infty x(s)Z^{-(s+k)}$
$= \sum_{s = -\infty}^\infty x(s)Z^{-s}Z^{-k}$
$= Z^{-k}[\sum_{s=-\infty}^\infty x(m)Z^{-s}]$
$= Z^{-k}X(Z)$ (Hence Proved)
Here, ROC can be written as Z = 0 (p>0) or Z = ∞(p<0)
Example
U(n) and U(n-1) can be plotted as follows
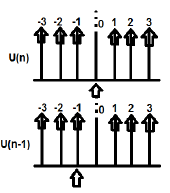
Z-transformation of U(n) cab be written as;
$\sum_{n = -\infty}^\infty [U(n)]Z^{-n} = 1$
Z-transformation of U(n-1) can be written as;
$\sum_{n = -\infty}^\infty [U(n-1)]Z^{-n} = Z^{-1}$
So here $x(n-n_0) = Z^{-n_0}X(Z)$ (Hence Proved)
Time Scaling
Time Scaling property tells us, what will be the Z-domain of the signal when the time is scaled in its discrete form, which can be written as;
$$a^nx(n) \longleftrightarrow X(a^{-1}Z)$$Proof −
Let $y(p) = a^{p}x(p)$
$Y(P) = \sum_{p=-\infty}^\infty y(p)Z^{-p}$
$= \sum_{p=-\infty}^\infty a^px(p)Z^{-p}$
$= \sum_{p=-\infty}^\infty x(p)[a^{-1}Z]^{-p}$
$= X(a^{-1}Z)$(Hence proved)
ROC: = Mod(ar1) < Mod(Z) < Mod(ar2) where Mod = Modulus
Example
Let us determine the Z-transformation of $x(n) = a^n \cos \omega n$ using Time scaling property.
Solution −
We already know that the Z-transformation of the signal $\cos (\omega n)$ is given by −
$$\sum_{n=-\infty}^\infty(\cos \omega n)Z^{-n} = (Z^2-Z \cos \omega)/(Z^2-2Z\cos \omega +1)$$
Now, applying Time scaling property, the Z-transformation of $a^n \cos \omega n$ can be written as;
$\sum_{n=-\infty}^\infty(a^n\cos \omega n)Z^{-n} = X(a^{-1}Z)$
$= [(a^{-1}Z)^2-(a^{-1}Z \cos \omega n)]/((a^{-1}Z)^2-2(a^{-1}Z \cos \omega n)+1)$
$= Z(Z-a \cos \omega)/(Z^2-2az \cos \omega+a^2)$
Successive Differentiation
Successive Differentiation property shows that Z-transform will take place when we differentiate the discrete signal in time domain, with respect to time. This is shown as below.
$$\frac{dx(n)}{dn} = (1-Z^{-1})X(Z)$$Proof −
Consider the LHS of the equation − $\frac{dx(n)}{dn}$
$$= \frac{[x(n)-x(n-1)]}{[n-(n-1)]}$$$= x(n)-X(n-1)$
$= x(Z)-Z^{-1}x(Z)$
$= (1-Z^{-1})x(Z)$ (Hence Proved)
ROC: R1< Mod (Z) <R2
Example
Let us find the Z-transform of a signal given by $x(n) = n^2u(n)$
By property we can write
$Zz[nU(n)] = -Z\frac{dZ[U(n)]}{dz}$
$= -Z\frac{d[\frac{Z}{Z-1}]}{dZ}$
$= Z/((Z-1)^2$
$= y(let)$
Now, Z[n.y] can be found out by again applying the property,
$Z(n,y) = -Z\frac{dy}{dz}$
$= -Z\frac{d[Z/(Z-1)^3]}{dz}$
$= Z(Z+1)/(Z-1)^2$
Convolution
This depicts the change in Z-domain of the system when a convolution takes place in the discrete signal form, which can be written as −
$x_1(n)*x_2(n) \longleftrightarrow X_1(Z).X_2(Z)$
Proof −
$X(Z) = \sum_{n = -\infty}^\infty x(n)Z^{-n}$
$= \sum_{n=-\infty}^\infty[\sum_{k = -\infty}^\infty x_1(k)x_2(n-k)]Z^{-n}$
$= \sum_{k = -\infty}^\infty x_1(k)[\sum_n^\infty x_2(n-k)Z^{-n}]$
$= \sum_{k = -\infty}^\infty x_1(k)[\sum_{n = -\infty}^\infty x_2(n-k)Z^{-(n-k)}Z^{-k}]$
Let n-k = l, then the above equation cab be written as −
$X(Z) = \sum_{k = -\infty}^\infty x_1(k)[Z^{-k}\sum_{l=-\infty}^\infty x_2(l)Z^{-l}]$
$= \sum_{k = -\infty}^\infty x_1(k)X_2(Z)Z^{-k}$
$= X_2(Z)\sum_{k = -\infty}^\infty x_1(Z)Z^{-k}$
$= X_1(Z).X_2(Z)$ (Hence Proved)
ROC:$ROC\bigcap ROC2$
Example
Let us find the convolution given by two signals
$x_1(n) = \lbrace 3,-2,2\rbrace$ ...(eq. 1)
$x_2(n) = \lbrace 2,0\leq 4\quad and\quad 0\quad elsewhere\rbrace$ ...(eq. 2)
Z-transformation of the first equation can be written as;
$\sum_{n = -\infty}^\infty x_1(n)Z^{-n}$
$= 3-2Z^{-1}+2Z^{-2}$
Z-transformation of the second signal can be written as;
$\sum_{n = -\infty}^\infty x_2(n)Z^{-n}$
$= 2+2Z^{-1}+2Z^{-2}+2Z^{-3}+2Z^{-4}$
So, the convolution of the above two signals is given by −
$X(Z) = [x_1(Z)^*x_2(Z)]$
$= [3-2Z^{-1}+2Z^{-2}]\times [2+2Z^{-1}+2Z^{-2}+2Z^{-3}+2Z^{-4}]$
$= 6+2Z^{-1}+6Z^{-2}+6Z^{-3}+...\quad...\quad...$
Taking the inverse Z-transformation we get,
$x(n) = \lbrace 6,2,6,6,6,0,4\rbrace$
Initial Value Theorem
If x(n) is a causal sequence, which has its Z-transformation as X(z), then the initial value theorem can be written as;
$X(n)(at\quad n = 0) = \lim_{z \to \infty} X(z)$
Proof − We know that,
$X(Z) = \sum_{n = 0} ^\infty x(n)Z^{-n}$
Expanding the above series, we get;
$= X(0)Z^0+X(1)Z^{-1}+X(2)Z^{-2}+...\quad...$
$= X(0)\times 1+X(1)Z^{-1}+X(2)Z^{-2}+...\quad...$
In the above case if Z → ∞ then $Z^{-n}\rightarrow 0$ (Because n>0)
Therefore, we can say;
$\lim_{z \to \infty}X(z) = X(0)$ (Hence Proved)
Final Value Theorem
Final Value Theorem states that if the Z-transform of a signal is represented as X(Z) and the poles are all inside the circle, then its final value is denoted as x(n) or X(∞) and can be written as −
$X(\infty) = \lim_{n \to \infty}X(n) = \lim_{z \to 1}[X(Z)(1-Z^{-1})]$
Conditions −
- It is applicable only for causal systems.
- $X(Z)(1-Z^{-1})$ should have poles inside the unit circle in Z-plane.
Proof − We know that
$Z^+[x(n+1)-x(n)] = \lim_{k \to \infty}\sum_{n=0}^kZ^{-n}[x(n+1)-x(n)]$
$\Rightarrow Z^+[x(n+1)]-Z^+[x(n)] = \lim_{k \to \infty}\sum_{n=0}^kZ^{-n}[x(n+1)-x(n)]$
$\Rightarrow Z[X(Z)^+-x(0)]-X(Z)^+ = \lim_{k \to \infty}\sum_{n = 0}^kZ^{-n}[x(n+1)-x(n)]$
Here, we can apply advanced property of one-sided Z-Transformation. So, the above equation can be re-written as;
$Z^+[x(n+1)] = Z[X(2)^+-x(0)Z^0] = Z[X(Z)^+-x(0)]$
Now putting z = 1 in the above equation, we can expand the above equation −
$\lim_{k \to \infty}{[x(1)-x(0)+x(6)-x(1)+x(3)-x(2)+...\quad...\quad...+x(x+1)-x(k)]}$
This can be formulated as;
$X(\infty) = \lim_{n \to \infty}X(n) = \lim_{z \to 1}[X(Z)(1-Z^{-1})]$(Hence Proved)
Example
Let us find the Initial and Final value of x(n) whose signal is given by
$X(Z) = 2+3Z^{-1}+4Z^{-2}$
Solution − Let us first, find the initial value of the signal by applying the theorem
$x(0) = \lim_{z \to \infty}X(Z)$
$= \lim_{z \to \infty}[2+3Z^{-1}+4Z^{-2}]$
$= 2+(\frac{3}{\infty})+(\frac{4}{\infty}) = 2$
Now let us find the Final value of signal applying the theorem
$x(\infty) = \lim_{z \to \infty}[(1-Z^{-1})X(Z)]$
$= \lim_{z \to \infty}[(1-Z^{-1})(2+3Z^{-1}+4Z^{-2})]$
$= \lim_{z \to \infty}[2+Z^{-1}+Z^{-2}-4Z^{-3}]$
$= 2+1+1-4 = 0$
Some other properties of Z-transform are listed below −
Differentiation in Frequency
It gives the change in Z-domain of the signal, when its discrete signal is differentiated with respect to time.
$nx(n)\longleftrightarrow -Z\frac{dX(z)}{dz}$
Its ROC can be written as;
$r_2< Mod(Z)< r_1$
Example
Let us find the value of x(n) through Differentiation in frequency, whose discrete signal in Z-domain is given by $x(n)\longleftrightarrow X(Z) = log(1+aZ^{-1})$
By property, we can write that
$nx(n)\longleftrightarrow -Z\frac{dx(Z)}{dz}$
$= -Z[\frac{-aZ^{-2}}{1+aZ^{-1}}]$
$= (aZ^{-1})/(1+aZ^{-1})$
$= 1-1/(1+aZ^{-1})$
$nx(n) = \delta(n)-(-a)^nu(n)$
$\Rightarrow x(n) = 1/n[\delta(n)-(-a)^nu(n)]$
Multiplication in Time
It gives the change in Z-domain of the signal when multiplication takes place at discrete signal level.
$x_1(n).x_2(n)\longleftrightarrow(\frac{1}{2\Pi j})[X1(Z)*X2(Z)]$
Conjugation in Time
This depicts the representation of conjugated discrete signal in Z-domain.
$X^*(n)\longleftrightarrow X^*(Z^*)$
