- Electrical Machines - Home
- Basic Concepts
- Electromechanical Energy Conversion
- Energy Stored in Magnetic Field
- Singly-Excited and Doubly Excited Systems
- Rotating Electrical Machines
- Electrical Machines Types
- Faraday’s Laws of Electromagnetic Induction
- Concept of Induced EMF
- Fleming's Left Hand and Right Hand Rules
- Transformers
- Electrical Transformer
- Construction of Transformer
- EMF Equation of Transformer
- Turns Ratio and Voltage Transformation Ratio
- Ideal Transformer
- Practical Transformer
- Ideal and Practical Transformers
- Transformer on DC
- Losses in a Transformer
- Efficiency of Transformer
- 3-Phase Transformer
- Types of Transformers
- More on Transformers
- Transformer Working Principle
- Single-Phase Transformer Working Principle
- 3-Phase Transformer Principle
- 3-Phase Induction Motor Torque-Slip
- 3-Phase Induction Motor Torque-Speed
- 3-Phase Transformer Harmonics
- Double-Star Connection (3-6 Phase)
- Double-delta Connection (3-6 Phase)
- Transformer Ratios
- Voltage Regulation
- Delta-Star Connection (3-Phase)
- Star-Delta Connection (3-Phase)
- Autotransformer Conversion
- Back-to-back Test (Sumpner's Test)
- Transformer Voltage Drop
- Autotransformer Output
- Open and Short Circuit Test
- 3-Phase Autotransformer
- Star-Star Connection
- 6-Phase Diametrical Connections
- Circuit Test (Three-Winding)
- Potential Transformer
- Transformers Parallel Operation
- Open Delta (V-V) Connection
- Autotransformer
- Current Transformer
- No-Load Current Wave
- Transformer Inrush Current
- Transformer Vector Groups
- 3 to 12-Phase Transformers
- Scott-T Transformer Connection
- Transformer kVA Rating
- Three-Winding Transformer
- Delta-Delta Connection Transformer
- Transformer DC Supply Issue
- Equivalent Circuit Transformer
- Simplified Equivalent Circuit of Transformer
- Transformer No-Load Condition
- Transformer Load Condition
- OTI WTI Transformer
- CVT Transformer
- Isolation vs Regular Transformer
- Dry vs Oil-Filled
- DC Machines
- Construction of DC Machines
- Types of DC Machines
- Working Principle of DC Generator
- EMF Equation of DC Generator
- Derivation of EMF Equation DC Generator
- Types of DC Generators
- Working Principle of DC Motor
- Back EMF in DC Motor
- Types of DC Motors
- Losses in DC Machines
- Applications of DC Machines
- More on DC Machines
- DC Generator
- DC Generator Armature Reaction
- DC Generator Commutator Action
- Stepper vs DC Motors
- DC Shunt Generators Critical Resistance
- DC Machines Commutation
- DC Motor Characteristics
- Synchronous Generator Working Principle
- DC Generator Characteristics
- DC Generator Demagnetizing & Cross-Magnetizing
- DC Motor Voltage & Power Equations
- DC Generator Efficiency
- Electric Breaking of DC Motors
- DC Motor Efficiency
- Four Quadrant Operation of DC Motors
- Open Circuit Characteristics of DC Generators
- Voltage Build-Up in Self-Excited DC Generators
- Types of Armature Winding in DC Machines
- Torque in DC Motors
- Swinburne’s Test of DC Machine
- Speed Control of DC Shunt Motor
- Speed Control of DC Series Motor
- DC Motor of Speed Regulation
- Hopkinson's Test
- Permanent Magnet DC Motor
- Permanent Magnet Stepper Motor
- DC Servo Motor Theory
- DC Series vs Shunt Motor
- BLDC Motor vs PMSM Motor
- Induction Motors
- Introduction to Induction Motor
- Single-Phase Induction Motor
- 3-Phase Induction Motor
- Construction of 3-Phase Induction Motor
- 3-Phase Induction Motor on Load
- Characteristics of 3-Phase Induction Motor
- Speed Regulation and Speed Control
- Methods of Starting 3-Phase Induction Motors
- More on Induction Motors
- 3-Phase Induction Motor Working Principle
- 3-Phase Induction Motor Rotor Parameters
- Double Cage Induction Motor Equivalent Circuit
- Induction Motor Equivalent Circuit Models
- Slip Ring vs Squirrel Cage Induction Motors
- Single-Cage vs Double-Cage Induction Motor
- Induction Motor Equivalent Circuits
- Induction Motor Crawling & Cogging
- Induction Motor Blocked Rotor Test
- Induction Motor Circle Diagram
- 3-Phase Induction Motors Applications
- 3-Phase Induction Motors Torque Ratios
- Induction Motors Power Flow Diagram & Losses
- Determining Induction Motor Efficiency
- Induction Motor Speed Control by Pole-Amplitude Modulation
- Induction Motor Inverted or Rotor Fed
- High Torque Cage Motors
- Double-Cage Induction Motor Torque-Slip Characteristics
- 3-Phase Induction Motors Starting Torque
- 3-phase Induction Motor - Rotor Resistance Starter
- 3-phase Induction Motor Running Torque
- 3-Phase Induction Motor - Rotating Magnetic Field
- Isolated Induction Generator
- Capacitor-Start Induction Motor
- Capacitor-Start Capacitor-Run Induction Motor
- Winding EMFs in 3-Phase Induction Motors
- Split-Phase Induction Motor
- Shaded Pole Induction Motor
- Repulsion-Start Induction-Run Motor
- Repulsion Induction Motor
- PSC Induction Motor
- Single-Phase Induction Motor Performance Analysis
- Linear Induction Motor
- Single-Phase Induction Motor Testing
- 3-Phase Induction Motor Fault Types
- Synchronous Machines
- Introduction to 3-Phase Synchronous Machines
- Construction of Synchronous Machine
- Working of 3-Phase Alternator
- Armature Reaction in Synchronous Machines
- Output Power of 3-Phase Alternator
- Losses and Efficiency of an Alternator
- Losses and Efficiency of 3-Phase Alternator
- Working of 3-Phase Synchronous Motor
- Equivalent Circuit and Power Factor of Synchronous Motor
- Power Developed by Synchronous Motor
- More on Synchronous Machines
- AC Motor Types
- Induction Generator (Asynchronous Generator)
- Synchronous Speed Slip of 3-Phase Induction Motor
- Armature Reaction in Alternator at Leading Power Factor
- Armature Reaction in Alternator at Lagging Power Factor
- Stationary Armature vs Rotating Field Alternator Advantages
- Synchronous Impedance Method for Voltage Regulation
- Saturated & Unsaturated Synchronous Reactance
- Synchronous Reactance & Impedance
- Significance of Short Circuit Ratio in Alternator
- Hunting Effect Alternator
- Hydrogen Cooling in Synchronous Generators
- Excitation System of Synchronous Machine
- Equivalent Circuit Phasor Diagram of Synchronous Generator
- EMF Equation of Synchronous Generator
- Cooling Methods for Synchronous Generators
- Assumptions in Synchronous Impedance Method
- Armature Reaction at Unity Power Factor
- Voltage Regulation of Alternator
- Synchronous Generator with Infinite Bus Operation
- Zero Power Factor of Synchronous Generator
- Short Circuit Ratio Calculation of Synchronous Machines
- Speed-Frequency Relationship in Alternator
- Pitch Factor in Alternator
- Max Reactive Power in Synchronous Generators
- Power Flow Equations for Synchronous Generator
- Potier Triangle for Voltage Regulation in Alternators
- Parallel Operation of Alternators
- Load Sharing in Parallel Alternators
- Slip Test on Synchronous Machine
- Constant Flux Linkage Theorem
- Blondel's Two Reaction Theory
- Synchronous Machine Oscillations
- Ampere Turn Method for Voltage Regulation
- Salient Pole Synchronous Machine Theory
- Synchronization by Synchroscope
- Synchronization by Synchronizing Lamp Method
- Sudden Short Circuit in 3-Phase Alternator
- Short Circuit Transient in Synchronous Machines
- Power-Angle of Salient Pole Machines
- Prime-Mover Governor Characteristics
- Power Input of Synchronous Generator
- Power Output of Synchronous Generator
- Power Developed by Salient Pole Motor
- Phasor Diagrams of Cylindrical Rotor Moto
- Synchronous Motor Excitation Voltage Determination
- Hunting Synchronous Motor
- Self-Starting Synchronous Motor
- Unidirectional Torque Production in Synchronous Motor
- Effect of Load Change on Synchronous Motor
- Field Excitation Effect on Synchronous Motor
- Output Power of Synchronous Motor
- Input Power of Synchronous Motor
- V Curves & Inverted V Curves of Synchronous Motor
- Torque in Synchronous Motor
- Construction of 3-Phase Synchronous Motor
- Synchronous Motor
- Synchronous Condenser
- Power Flow in Synchronous Motor
- Types of Faults in Alternator
- Miscellaneous Topics
- Electrical Generator
- Determining Electric Motor Load
- Solid State Motor Starters
- Characteristics of Single-Phase Motor
- Types of AC Generators
- Three-Point Starter
- Four-Point Starter
- Ward Leonard Speed Control Method
- Pole Changing Method
- Stator Voltage Control Method
- DOL Starter
- Star-Delta Starter
- Hysteresis Motor
- 2-Phase & 3-Phase AC Servo Motors
- Repulsion Motor
- Reluctance Motor
- Stepper Motor
- PCB Motor
- Single-Stack Variable Reluctance Stepper Motor
- Schrage Motor
- Hybrid Schrage Motor
- Multi-Stack Variable Reluctance Stepper Motor
- Universal Motor
- Step Angle in Stepper Motor
- Stepper Motor Torque-Pulse Rate Characteristics
- Distribution Factor
- Electrical Machines Basic Terms
- Synchronizing Torque Coefficient
- Synchronizing Power Coefficient
- Metadyne
- Motor Soft Starter
- CVT vs PT
- Metering CT vs Protection CT
- Stator and Rotor in Electrical Machines
- Electric Motor Winding
- Electric Motor
- Useful Resources
- Quick Guide
- Resources
- Discussion
Crawling and Cogging in Induction Motors
Crawling in Induction Motor
Let's understand the concept of crawling in induction motors (or Effect of Harmonics on the Performance of 3-Phase Induction Motor). The flux in the air-gap of an induction motor set up by the 3-phase stator windings carrying sinusoidal currents is of non-sinusoidal wave shape. According to the Fourier series analysis, any non-sinusoidal flux is equivalent to the combination of a number of sinusoidal fluxes of fundamental and higher order harmonics.
Since the wave shapes of the air-gap flux have half-wave symmetry, hence all the even harmonics (i.e., 2 nd, 4th, 6th, … etc.) are absent in the Fourier series. Thus, a non-sinusoidal flux wave can be resolved into fluxes of fundamental and higher-order odd harmonics (i.e., 3rd, 5th, 7th, 11th , …, etc.)
The 3rd harmonic flux wave produced by each of the three phases neutralise one another. Hence, the resultant air gap flux is free from the third and its multiples (i.e., 3rd, 9th, etc.) harmonics. It is because the third harmonic in the flux wave of all the three phases are in the space phase, but they differ in time phase by 120°.
The space harmonics are produced by windings, slotting, magnetic saturation and inequalities in the air gap length etc. These harmonic flux waves induce EMFs and circulate harmonic currents in rotor windings. These harmonic currents in the rotor windings interact with the harmonic fluxes to produce harmonic torques, vibrations and noise.
The order of the space harmonic which is produced by a 3-phase winding carrying sinusoidal currents is given by,
$$\mathrm{h \: = \: 6x \: \pm \: 1}$$
Where, x is a positive integer (1, 2, 3, …). The synchronous speed of the hth harmonic is (1/h) times of the speed of the fundamental harmonic wave.
If
$$\mathrm{h \:=\: 6x \:+\: 1}$$
Then, the space harmonic waves rotate in the same direction as the fundamental wave, and when,
$$\mathrm{h \:=\: 6x \:-\: 1}$$
Then, the space harmonic waves rotate in the opposite direction of the fundamental wave.
A space harmonic wave of the order of h is equivalent to a machine with the number poles equal to h times of the number of poles of the stator. Thus, the synchronous speed of the hth harmonic wave is given by,
$$\mathrm{N_{s(h)} \:=\: \frac{N_s}{h} \:=\: \frac{120f}{h \: \times \: p}}$$
Where,
- f = stator frequency,
- P = number of stator poles,
- Ns = synchronous speed of the motor of P-poles.
Thus, for x = 1, a 3-phase winding will produce a predominant backward rotating 5th harmonic which is rotating at a speed of (1/5) of the synchronous speed and a forward rotating seventh harmonic which is rotating at a speed of (1/7) of the synchronous speed. These harmonics alone will have little effect on the operation of the induction motor.
The figure shows the torque-speed characteristics for the fundamental flux wave, 5th and 7th harmonics flux wave. The shape of the torque of 5 th and 7th harmonics is same as that of the fundamental flux.
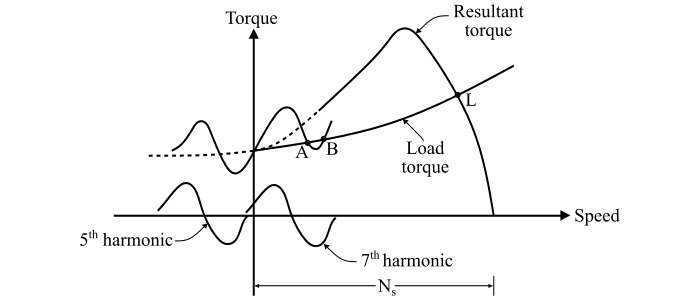
Since the 5th harmonic flux rotates in opposite direction to the rotation of the rotor, thus the 5th harmonic torque opposes the fundamental torque. Whereas, the 7th harmonic flux rotates in the same direction as the fundamental flux. Hence, the 7th harmonic induction torque aids the fundamental torque. Therefore, the resultant torque-speed characteristics will be the combination of the fundamental, 5th and 7th harmonic characteristics (see the figure above).
The resultant torque-speed characteristics has two dips, one is near (1/5) of the synchronous speed and the other is near (1/7) of the synchronous speed. The dip near (1/5) of the synchronous speed occurs in the negative direction of the rotation of the motor.
If the torque in the motor is developed only due to the fundamental flux, then the motor will accelerate to the point L which is the intersection of the load-torque characteristics and the torque-speed curve of the motor.
Due to the presence of the 7th harmonic torque, the load torque curve intersects the torque-speed curve of the motor at point A. Since the 7th harmonic flux-torque curve has a negative slope at the point A, it results in the stable running condition over the torque range between the maximum and minimum points. Consequently, the motor torque falls below the load torque. At this stage, the motor will not accelerate up to its normal speed, but will remain running at a speed which is nearly (1/7) of its normal speed and hence the operating point would be the point A.
Therefore, the tendency of the motor to run at a stable speed as low as (1/7) of the synchronous speed (Ns) and being unable to pick up its normal speed is called as crawling of the induction motor.
By reducing the 5th and 7th harmonics, the crawling in the induction motor can be reduced. This can be done by using a chorded or short pitched winding.
Cogging in Induction Motor
The cogging in the induction motor is also known as magnetic locking or teeth locking.
Sometimes, even with the full voltage applied to the stator winding, the rotor of a 3-phase squirrel cage induction motor fails to start. This happens when the number of stator and rotor slots are equal or when the stator slots are an integral multiples of rotor slots.
When the stator and rotor slots are equal or have an integral ratio, then the strong alignment forces are produced between the stator and the rotor at the instant of starting. These forces may create an alignment torque greater than the accelerating torque, which results in the failure of the motor to start. This phenomenon of the magnetic locking between the stator and rotor teeth of an induction motor at the time starting is known as cogging or teeth locking.
In order to reduce or eliminate cogging or teeth locking in the induction motors, the number of stator slots are never made equal to or an integral multiple of the rotor slots. In the squirrel cage induction motors, the cogging can also be decreased by using skewed rotor.