- Electrical Machines - Home
- Basic Concepts
- Electromechanical Energy Conversion
- Energy Stored in Magnetic Field
- Singly-Excited and Doubly Excited Systems
- Rotating Electrical Machines
- Electrical Machines Types
- Faraday’s Laws of Electromagnetic Induction
- Concept of Induced EMF
- Fleming's Left Hand and Right Hand Rules
- Transformers
- Electrical Transformer
- Construction of Transformer
- EMF Equation of Transformer
- Turns Ratio and Voltage Transformation Ratio
- Ideal Transformer
- Practical Transformer
- Ideal and Practical Transformers
- Transformer on DC
- Losses in a Transformer
- Efficiency of Transformer
- 3-Phase Transformer
- Types of Transformers
- More on Transformers
- Transformer Working Principle
- Single-Phase Transformer Working Principle
- 3-Phase Transformer Principle
- 3-Phase Induction Motor Torque-Slip
- 3-Phase Induction Motor Torque-Speed
- 3-Phase Transformer Harmonics
- Double-Star Connection (3-6 Phase)
- Double-delta Connection (3-6 Phase)
- Transformer Ratios
- Voltage Regulation
- Delta-Star Connection (3-Phase)
- Star-Delta Connection (3-Phase)
- Autotransformer Conversion
- Back-to-back Test (Sumpner's Test)
- Transformer Voltage Drop
- Autotransformer Output
- Open and Short Circuit Test
- 3-Phase Autotransformer
- Star-Star Connection
- 6-Phase Diametrical Connections
- Circuit Test (Three-Winding)
- Potential Transformer
- Transformers Parallel Operation
- Open Delta (V-V) Connection
- Autotransformer
- Current Transformer
- No-Load Current Wave
- Transformer Inrush Current
- Transformer Vector Groups
- 3 to 12-Phase Transformers
- Scott-T Transformer Connection
- Transformer kVA Rating
- Three-Winding Transformer
- Delta-Delta Connection Transformer
- Transformer DC Supply Issue
- Equivalent Circuit Transformer
- Simplified Equivalent Circuit of Transformer
- Transformer No-Load Condition
- Transformer Load Condition
- OTI WTI Transformer
- CVT Transformer
- Isolation vs Regular Transformer
- Dry vs Oil-Filled
- DC Machines
- Construction of DC Machines
- Types of DC Machines
- Working Principle of DC Generator
- EMF Equation of DC Generator
- Derivation of EMF Equation DC Generator
- Types of DC Generators
- Working Principle of DC Motor
- Back EMF in DC Motor
- Types of DC Motors
- Losses in DC Machines
- Applications of DC Machines
- More on DC Machines
- DC Generator
- DC Generator Armature Reaction
- DC Generator Commutator Action
- Stepper vs DC Motors
- DC Shunt Generators Critical Resistance
- DC Machines Commutation
- DC Motor Characteristics
- Synchronous Generator Working Principle
- DC Generator Characteristics
- DC Generator Demagnetizing & Cross-Magnetizing
- DC Motor Voltage & Power Equations
- DC Generator Efficiency
- Electric Breaking of DC Motors
- DC Motor Efficiency
- Four Quadrant Operation of DC Motors
- Open Circuit Characteristics of DC Generators
- Voltage Build-Up in Self-Excited DC Generators
- Types of Armature Winding in DC Machines
- Torque in DC Motors
- Swinburne’s Test of DC Machine
- Speed Control of DC Shunt Motor
- Speed Control of DC Series Motor
- DC Motor of Speed Regulation
- Hopkinson's Test
- Permanent Magnet DC Motor
- Permanent Magnet Stepper Motor
- DC Servo Motor Theory
- DC Series vs Shunt Motor
- BLDC Motor vs PMSM Motor
- Induction Motors
- Introduction to Induction Motor
- Single-Phase Induction Motor
- 3-Phase Induction Motor
- Construction of 3-Phase Induction Motor
- 3-Phase Induction Motor on Load
- Characteristics of 3-Phase Induction Motor
- Speed Regulation and Speed Control
- Methods of Starting 3-Phase Induction Motors
- More on Induction Motors
- 3-Phase Induction Motor Working Principle
- 3-Phase Induction Motor Rotor Parameters
- Double Cage Induction Motor Equivalent Circuit
- Induction Motor Equivalent Circuit Models
- Slip Ring vs Squirrel Cage Induction Motors
- Single-Cage vs Double-Cage Induction Motor
- Induction Motor Equivalent Circuits
- Induction Motor Crawling & Cogging
- Induction Motor Blocked Rotor Test
- Induction Motor Circle Diagram
- 3-Phase Induction Motors Applications
- 3-Phase Induction Motors Torque Ratios
- Induction Motors Power Flow Diagram & Losses
- Determining Induction Motor Efficiency
- Induction Motor Speed Control by Pole-Amplitude Modulation
- Induction Motor Inverted or Rotor Fed
- High Torque Cage Motors
- Double-Cage Induction Motor Torque-Slip Characteristics
- 3-Phase Induction Motors Starting Torque
- 3-phase Induction Motor - Rotor Resistance Starter
- 3-phase Induction Motor Running Torque
- 3-Phase Induction Motor - Rotating Magnetic Field
- Isolated Induction Generator
- Capacitor-Start Induction Motor
- Capacitor-Start Capacitor-Run Induction Motor
- Winding EMFs in 3-Phase Induction Motors
- Split-Phase Induction Motor
- Shaded Pole Induction Motor
- Repulsion-Start Induction-Run Motor
- Repulsion Induction Motor
- PSC Induction Motor
- Single-Phase Induction Motor Performance Analysis
- Linear Induction Motor
- Single-Phase Induction Motor Testing
- 3-Phase Induction Motor Fault Types
- Synchronous Machines
- Introduction to 3-Phase Synchronous Machines
- Construction of Synchronous Machine
- Working of 3-Phase Alternator
- Armature Reaction in Synchronous Machines
- Output Power of 3-Phase Alternator
- Losses and Efficiency of an Alternator
- Losses and Efficiency of 3-Phase Alternator
- Working of 3-Phase Synchronous Motor
- Equivalent Circuit and Power Factor of Synchronous Motor
- Power Developed by Synchronous Motor
- More on Synchronous Machines
- AC Motor Types
- Induction Generator (Asynchronous Generator)
- Synchronous Speed Slip of 3-Phase Induction Motor
- Armature Reaction in Alternator at Leading Power Factor
- Armature Reaction in Alternator at Lagging Power Factor
- Stationary Armature vs Rotating Field Alternator Advantages
- Synchronous Impedance Method for Voltage Regulation
- Saturated & Unsaturated Synchronous Reactance
- Synchronous Reactance & Impedance
- Significance of Short Circuit Ratio in Alternator
- Hunting Effect Alternator
- Hydrogen Cooling in Synchronous Generators
- Excitation System of Synchronous Machine
- Equivalent Circuit Phasor Diagram of Synchronous Generator
- EMF Equation of Synchronous Generator
- Cooling Methods for Synchronous Generators
- Assumptions in Synchronous Impedance Method
- Armature Reaction at Unity Power Factor
- Voltage Regulation of Alternator
- Synchronous Generator with Infinite Bus Operation
- Zero Power Factor of Synchronous Generator
- Short Circuit Ratio Calculation of Synchronous Machines
- Speed-Frequency Relationship in Alternator
- Pitch Factor in Alternator
- Max Reactive Power in Synchronous Generators
- Power Flow Equations for Synchronous Generator
- Potier Triangle for Voltage Regulation in Alternators
- Parallel Operation of Alternators
- Load Sharing in Parallel Alternators
- Slip Test on Synchronous Machine
- Constant Flux Linkage Theorem
- Blondel's Two Reaction Theory
- Synchronous Machine Oscillations
- Ampere Turn Method for Voltage Regulation
- Salient Pole Synchronous Machine Theory
- Synchronization by Synchroscope
- Synchronization by Synchronizing Lamp Method
- Sudden Short Circuit in 3-Phase Alternator
- Short Circuit Transient in Synchronous Machines
- Power-Angle of Salient Pole Machines
- Prime-Mover Governor Characteristics
- Power Input of Synchronous Generator
- Power Output of Synchronous Generator
- Power Developed by Salient Pole Motor
- Phasor Diagrams of Cylindrical Rotor Moto
- Synchronous Motor Excitation Voltage Determination
- Hunting Synchronous Motor
- Self-Starting Synchronous Motor
- Unidirectional Torque Production in Synchronous Motor
- Effect of Load Change on Synchronous Motor
- Field Excitation Effect on Synchronous Motor
- Output Power of Synchronous Motor
- Input Power of Synchronous Motor
- V Curves & Inverted V Curves of Synchronous Motor
- Torque in Synchronous Motor
- Construction of 3-Phase Synchronous Motor
- Synchronous Motor
- Synchronous Condenser
- Power Flow in Synchronous Motor
- Types of Faults in Alternator
- Miscellaneous Topics
- Electrical Generator
- Determining Electric Motor Load
- Solid State Motor Starters
- Characteristics of Single-Phase Motor
- Types of AC Generators
- Three-Point Starter
- Four-Point Starter
- Ward Leonard Speed Control Method
- Pole Changing Method
- Stator Voltage Control Method
- DOL Starter
- Star-Delta Starter
- Hysteresis Motor
- 2-Phase & 3-Phase AC Servo Motors
- Repulsion Motor
- Reluctance Motor
- Stepper Motor
- PCB Motor
- Single-Stack Variable Reluctance Stepper Motor
- Schrage Motor
- Hybrid Schrage Motor
- Multi-Stack Variable Reluctance Stepper Motor
- Universal Motor
- Step Angle in Stepper Motor
- Stepper Motor Torque-Pulse Rate Characteristics
- Distribution Factor
- Electrical Machines Basic Terms
- Synchronizing Torque Coefficient
- Synchronizing Power Coefficient
- Metadyne
- Motor Soft Starter
- CVT vs PT
- Metering CT vs Protection CT
- Stator and Rotor in Electrical Machines
- Electric Motor Winding
- Electric Motor
- Useful Resources
- Quick Guide
- Resources
- Discussion
Characteristics of DC Motors: Shunt, Series and Compound Motors
The performance of a DC motor is given by the relation among the armature current, torque and speed. These relations are given graphically in the form of curves, which are called as characteristics of DC motors. These characteristics show the behaviour of the DC motor under different load conditions.
Following are the three important characteristics of a DC motor
Torque and Armature Current Characteristics
It is the graph plotted between the armature torque (τa) and the armature current (Ia) of a DC motor. It is also known as electrical characteristics of the DC motor.
Speed and Armature Current Characteristics
It is the graph plotted between the speed (N) and the armature current (Ia) of a DC motor. This characteristic curve is mainly used for selecting a motor for a particular application.
Speed and Torque Characteristics
The graph plotted between the speed (N) and the armature torque (τa) for a DC motor is known as the speed-torque characteristics. It is also known as mechanical characteristics of DC motor.
Characteristics of DC Shunt Motor
The shunt motors are the constant flux machines i.e. their magnetic flux remains constant because their field winding is directly connected across the supply voltage which is assumed to be constant.
Torque and Armature Current Characteristics
The armature torque in a DC motor is directly proportional to the flux and the armature current, i.e.,
$$\mathrm{\tau_{a} \: \varpropto \: \varphi \: I_{a}}$$
In case of a shunt motor, the flux is also constant. Therefore,
$$\mathrm{\tau_{a} \: \varpropto \: I_{a}}$$
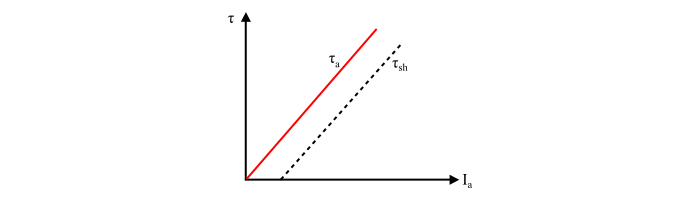
Hence, the torque and armature current characteristics of DC shunt motor is straight line passing through the origin (see the figure). The shaft torque is less than the armature torque which is represented by the dotted line.
From the characteristics, it can be seen that a very large current is required to start a heavy load. Thus, the shunt motor should not be started on heavy loads.
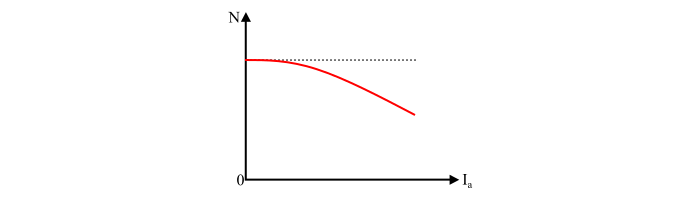
Speed and Armature Current Characteristics
The Speed of a shunt DC motor is given by,
$$\mathrm{N \: \varpropto \: E_{b}}$$
$$\mathrm{\because \: E_{b} \: = \: V \: - \: I_{a}R_{a}}$$
$$\mathrm{\therefore \: N \: \propto \:(V \: - \: I_{a}R_{a})}$$
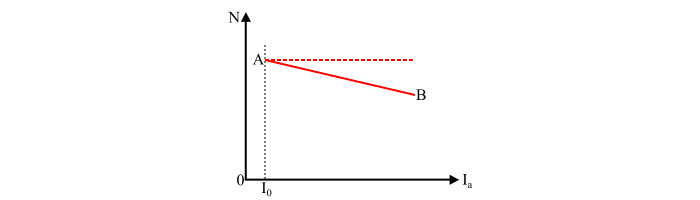
For a DC shunt motor, the back EMF and flux both are constant under normal operating conditions. Therefore, the speed of a shunt motor will remain constant with respect to armature current as shown by dotted line.
However, when the load is increased, the back EMF and flux decreases due to the drop in armature resistance and armature reaction respectively. Although the back EMF decreases somewhat greater than the flux so that speed of motor decreases slight with the increase in load (as line AB).
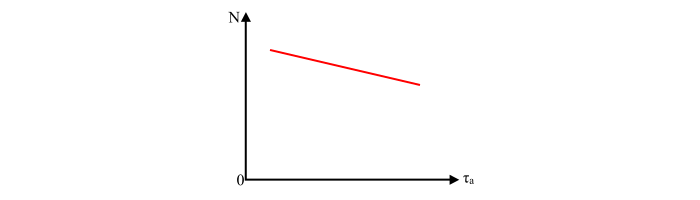
Speed and Torque Characteristics
This is the curve plotted between the speed and the torque for various armature currents. It can be seen that the speed of the shunt motor decreases as the load torque increases.
Characteristics of DC Series Motor
In a DC series motor, the field winding is connected in series with the armature and hence carries the full armature current. When the load on shaft of the motor is increased, the armature current also increases. Hence, the flux in a series motor increases with the increase in the armature current and vice-versa.
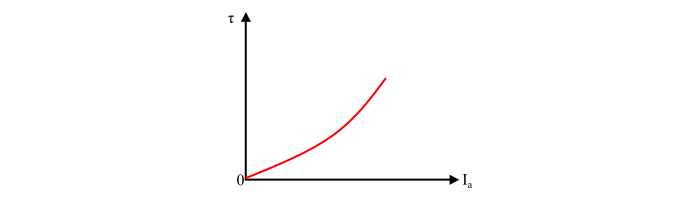
Torque and Armature Current Characteristics
In a DC motor,
$$\mathrm{\tau_{a} \: \propto \: \varphi \: I_{a}}$$
$$\mathrm{\text{Upto magnetic saturation, }\: \varphi \: \propto \: I_{a}; \:\text{ so that } \: \tau_{a} \: \propto \: I_{a}^{2}}$$
$$\mathrm{\text{After magnetic saturation, }\: \phi \: \text{becomes constant so that,} \: \tau_{a} \: \propto \: I_{a}}$$
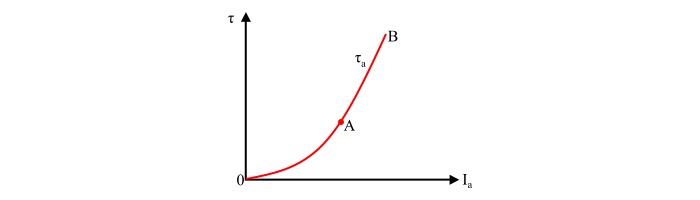
Therefore, up to magnetic saturation, the armature torque is directly proportional to the square of the armature current. Hence, the torque versus armature current curve upto magnetic saturation is a parabola (part OA of the curve).
After the magnetic saturation, the armature torque is directly proportional to the armature current. Hence, torque versus armature current curve after magnetic saturation is a straight line (Part AB of the curve).
From the torque versus armature current curve, it is clear that the starting torque of a DC series motor is very high.
Speed and Armature Current Characteristics
The speed of a DC series motor is given by,
$$\mathrm{N \: \propto \: \frac{E_{b}}{\varphi}; \: \text{ Where, } \: E_{b} \: = \: V \: - \: I_{a}(R_{a} \: + \: R_{se})}$$
With the increase in the armature current, the back EMF is decreased due to the ohmic drop in armature and series field resistances whereas the flux is increased. Although, the resistance drop is very small under normal operating conditions and can be neglected, thus,
$$\mathrm{N \: \propto \: \frac{1}{\varphi} \: \propto \: \frac{1}{I_{a}}; \: \text{Up to magnetic saturation.}}$$
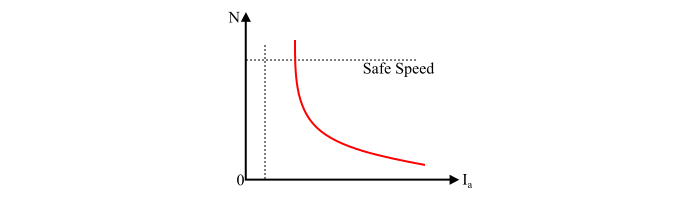
Hence, up to magnetic saturation the speed versus armature current curve is a hyperbola while after the magnetic saturation, the flux becomes constant and hence the speed
Speed and Torque Characteristics
The speed torque characteristics of a DC series motor can be obtained from its speed-armature current and torque-armature current characteristics as follows
For a given value of Ia determine τa from the torque-armature current curve and N from the speed-armature current curve. This will give a point (τ,N) on speed-torque curve. Repeat this procedure for different values of armature current and determine the corresponding values of speed and torque (τ1, N1), (τ2, N2) etc.
When these points are plotted on the graph, we obtain the speed and torque characteristics of a DC series motor as shown in the figure.
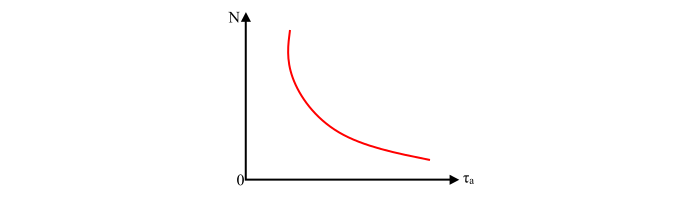
It is clear from the characteristics that the series motor has high torque at low speed and vice-versa. Thus, the series DC motor is used where high starting torque is required.
Important − At no-load, the armature current is very small and so is the flux. Hence, the speed increases to a dangerously high value which can damage the machine. Therefore, a series motor should never be started on no-load.
Characteristics of Cumulative Compound DC Motor
A cumulative compound DC motor is the one in which the series field aids the shunt field i.e. both are in same direction.
Torque and Armature Current Characteristics
When the armature current is increased, the series field increases whereas the shunt field remains constant. As a result, the total flux in the machine is increases and hence the armature torque.
Speed and Armature Current Characteristics
When the load is increased, the armature current is also increased which increases the flux per pole. Consequently, the speed of the motor decreases with the increase in the load. Therefore, a cumulative compound motor has poor speed regulation.
Speed and Torque Characteristics
For a given armature current, the torque of a cumulative compound motor is greater than that of a shunt motor but less than that of a series motor.

