
Article Categories
- All Categories
-
 Data Structure
Data Structure
-
 Networking
Networking
-
 RDBMS
RDBMS
-
 Operating System
Operating System
-
 Java
Java
-
 MS Excel
MS Excel
-
 iOS
iOS
-
 HTML
HTML
-
 CSS
CSS
-
 Android
Android
-
 Python
Python
-
 C Programming
C Programming
-
 C++
C++
-
 C#
C#
-
 MongoDB
MongoDB
-
 MySQL
MySQL
-
 Javascript
Javascript
-
 PHP
PHP
-
 Economics & Finance
Economics & Finance
What is a robonaut? Can it replace astronauts in the future?
Robonaut is a NASA robot, which is designed as a humanoid. The artificial intelligence makes it easier for Robonaut to do the same jobs as a human. Robonaut could help with anything from working on the International Space Station to exploring other worlds. The core idea behind the Robonaut series is to have a humanoid machine work alongside astronauts. Its form factor and dexterity are designed such that Robonaut can use space tools and work in similar environments suited to astronauts.
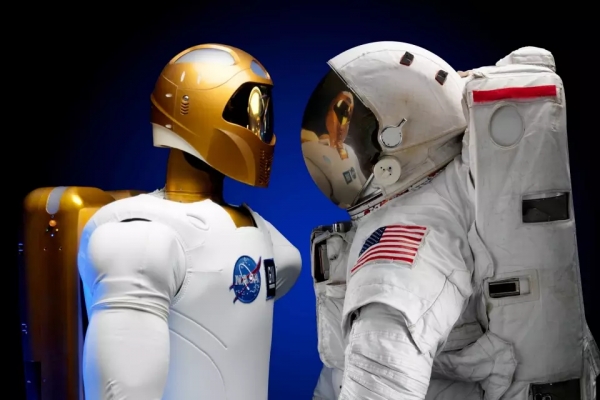
These new space explorers won’t need space suits or oxygen to survive outside of the spacecraft. Thus they might help in saving both time and human life while increasing the efficiency of the mission. The problem with human space exploration is that the human body is too fragile for the harsh conditions of space. Temperatures in space can swing from 120 C to -100 C. There also isn’t the Earth’s atmosphere to shield us from the sun’s radiation. In order to survive, astronauts must wear bulky space suits. Space suits are not practical for an emergency situation, in situations like the International Space Station (ISS) were struck by an object and needed to be repaired immediately.
Robonaut 1
Robonaut 1 (R1) was the first model. R1B is a portable version of R1. One of these was the Zero-G Leg, which if Robonaut was working on the space station he would climb using the external handrails and then use his zero-g leg to latch onto the station using a WIF socket. Another was the Robotic Mobility Platform, it is a base with two wheels using a Segway PT. And the four-wheeled Centaur 1, which was developed in 2006.
Robonaut 2
R2 is capable of speeds more than four times faster than R1, is more compact, more dexterous, and includes a deeper and wider range of sensing. It can move its arms up to 2 m/s, has a 40 lbs payload capacity and its hands have a grasping force of roughly 5 lbs. per finger. There are over 350 sensors and38 PowerPC processors in the robot.
Space Station crew members will be able to operate R2, as much as controllers on the ground; both can do so using telepresence. One of the improvements over the previous Robonaut generation is that R2 doesn’t need constant supervision. In anticipation of a future destination in which distance and time delays would make continuous management problematic, R2 was designed to be set to tasks and then carry out them autonomously with periodic status checks.
Upgradations in Robonaut 2
Increased force sensing
Greater range of motion
Higher bandwidth
Improved dexterity
R2’s integrated mechatronic design results in a more compact and robust distributed control system with a fraction of the wiring of the original Robonaut
Modularity is prevalent throughout the hardware and software along with innovative and layered approaches for sensing and control

User Interface
The R2 interface uses common elements such as buttons and sliders to provide the user with direct control over the basic functionality of the robot.
The interface uses a monitored network link to receive telemetry, events, and status updates from the system and to send commands out to the robot.
The on-screen interface is configurable to allow the operator to move displays to an orientation well suited for the current task and it provides the ability to log and graph both incoming and outgoing data.
Application
Can aid fellow astronauts in performing various tasks
Can be operated in hazardous conditions where humans cannot sustain.
Can handle the operations with great precision.
Can be used in repairing space stations.
Can also be sent to distant planets where the journey would take many years to complete.

600 Views
