- Home
- Basics of Algorithms
- DAA - Introduction to Algorithms
- DAA - Analysis of Algorithms
- DAA - Methodology of Analysis
- DAA - Asymptotic Notations & Apriori Analysis
- DAA - Time Complexity
- DAA - Master's Theorem
- DAA - Space Complexities
- Divide & Conquer
- DAA - Divide & Conquer Algorithm
- DAA - Max-Min Problem
- DAA - Merge Sort Algorithm
- DAA - Strassen's Matrix Multiplication
- DAA - Karatsuba Algorithm
- DAA - Towers of Hanoi
- Greedy Algorithms
- DAA - Greedy Algorithms
- DAA - Travelling Salesman Problem
- DAA - Prim's Minimal Spanning Tree
- DAA - Kruskal's Minimal Spanning Tree
- DAA - Dijkstra's Shortest Path Algorithm
- DAA - Map Colouring Algorithm
- DAA - Fractional Knapsack
- DAA - Job Sequencing with Deadline
- DAA - Optimal Merge Pattern
- Dynamic Programming
- DAA - Dynamic Programming
- DAA - Matrix Chain Multiplication
- DAA - Floyd Warshall Algorithm
- DAA - 0-1 Knapsack Problem
- DAA - Longest Common Subsequence Algorithm
- DAA - Travelling Salesman Problem using Dynamic Programming
- Randomized Algorithms
- DAA - Randomized Algorithms
- DAA - Randomized Quick Sort Algorithm
- DAA - Karger's Minimum Cut Algorithm
- DAA - Fisher-Yates Shuffle Algorithm
- Approximation Algorithms
- DAA - Approximation Algorithms
- DAA - Vertex Cover Problem
- DAA - Set Cover Problem
- DAA - Travelling Salesperson Approximation Algorithm
- Sorting Techniques
- DAA - Bubble Sort Algorithm
- DAA - Insertion Sort Algorithm
- DAA - Selection Sort Algorithm
- DAA - Shell Sort Algorithm
- DAA - Heap Sort Algorithm
- DAA - Bucket Sort Algorithm
- DAA - Counting Sort Algorithm
- DAA - Radix Sort Algorithm
- DAA - Quick Sort Algorithm
- Searching Techniques
- DAA - Searching Techniques Introduction
- DAA - Linear Search
- DAA - Binary Search
- DAA - Interpolation Search
- DAA - Jump Search
- DAA - Exponential Search
- DAA - Fibonacci Search
- DAA - Sublist Search
- DAA - Hash Table
- Graph Theory
- DAA - Shortest Paths
- DAA - Multistage Graph
- DAA - Optimal Cost Binary Search Trees
- Heap Algorithms
- DAA - Binary Heap
- DAA - Insert Method
- DAA - Heapify Method
- DAA - Extract Method
- Complexity Theory
- DAA - Deterministic vs. Nondeterministic Computations
- DAA - Max Cliques
- DAA - Vertex Cover
- DAA - P and NP Class
- DAA - Cook's Theorem
- DAA - NP Hard & NP-Complete Classes
- DAA - Hill Climbing Algorithm
- DAA Useful Resources
- DAA - Quick Guide
- DAA - Useful Resources
- DAA - Discussion
Time Complexity

In this chapter, let us discuss the time complexity of algorithms and the factors that influence it.
Time complexity
Time complexity of an algorithm, in general, is simply defined as the time taken by an algorithm to implement each statement in the code. It is not the execution time of an algorithm. This entity can be influenced by various factors like the input size, the methods used and the procedure. An algorithm is said to be the most efficient when the output is produced in the minimal time possible.
The most common way to find the time complexity for an algorithm is to deduce the algorithm into a recurrence relation. Let us look into it further below.
Solving Recurrence Relations
A recurrence relation is an equation (or an inequality) that is defined by the smaller inputs of itself. These relations are solved based on Mathematical Induction. In both of these processes, a condition allows the problem to be broken into smaller pieces that execute the same equation with lower valued inputs.
These recurrence relations can be solved using multiple methods; they are −
Substitution Method
Recurrence Tree Method
Iteration Method
Master Theorem
Substitution Method
The substitution method is a trial and error method; where the values that we might think could be the solution to the relation are substituted and check whether the equation is valid. If it is valid, the solution is found. Otherwise, another value is checked.
Procedure
The steps to solve recurrences using the substitution method are −
Guess the form of solution based on the trial and error method
Use Mathematical Induction to prove the solution is correct for all the cases.
Example
Let us look into an example to solve a recurrence using the substitution method,
T(n) = 2T(n/2) + n
Here, we assume that the time complexity for the equation is O(nlogn). So according the mathematical induction phenomenon, the time complexity for T(n/2) will be O(n/2logn/2); substitute the value into the given equation, and we need to prove that T(n) must be greater than or equal to nlogn.
≤ 2n/2Log(n/2) + n = nLogn - nLog2 + n = nLogn - n + n ≤ nLogn
Recurrence Tree Method
In the recurrence tree method, we draw a recurrence tree until the program cannot be divided into smaller parts further. Then we calculate the time taken in each level of the recurrence tree.
Procedure
Draw the recurrence tree for the program
Calculate the time complexity in every level and sum them up to find the total time complexity.
Example
Consider the binary search algorithm and construct a recursion tree for it −
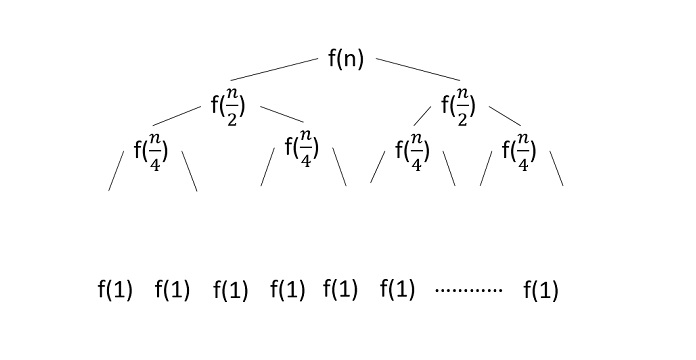
Since the algorithm follows divide and conquer technique, the recursion tree is drawn until it reaches the smallest input level $\mathrm{T\left ( \frac{n}{2^{k}} \right )}$.
$$\mathrm{T\left ( \frac{n}{2^{k}} \right )=T\left ( 1 \right )}$$
$$\mathrm{n=2^{k}}$$
Applying logarithm on both sides of the equation,
$$\mathrm{log\: n=log\: 2^{k}}$$
$$\mathrm{k=log_{2}\:n}$$
Therefore, the time complexity of a binary search algorithm is O(log n).
Master's Method
Master's method or Master's theorem is applied on decreasing or dividing recurrence relations to find the time complexity. It uses a set of formulae to deduce the time complexity of an algorithm.
To learn more about Master's theorem, please click here
