- ES - Home
- ES - Overview
- ES - Processors
- ES - Architectures
- ES - Tools and Peripherals
- ES - 8051 Microcontroller
- ES - I/O Programming
- ES - Terms
- ES - Assembly Language
- ES - Registers
- ES - Registers Bank/Stack
- ES - Instructions
- ES - Addressing Modes
- ES - Special Function Registers
- ES - Timer/Counter
- ES - Interrupts
Embedded Systems - Overview
System
A system is an arrangement in which all its unit assemble work together according to a set of rules. It can also be defined as a way of working, organizing or doing one or many tasks according to a fixed plan. For example, a watch is a time displaying system. Its components follow a set of rules to show time. If one of its parts fails, the watch will stop working. So we can say, in a system, all its subcomponents depend on each other.
Embedded System
As its name suggests, Embedded means something that is attached to another thing. An embedded system can be thought of as a computer hardware system having software embedded in it. An embedded system can be an independent system or it can be a part of a large system. An embedded system is a microcontroller or microprocessor based system which is designed to perform a specific task. For example, a fire alarm is an embedded system; it will sense only smoke.
An embedded system has three components −
It has hardware.
It has application software.
It has Real Time Operating system (RTOS) that supervises the application software and provide mechanism to let the processor run a process as per scheduling by following a plan to control the latencies. RTOS defines the way the system works. It sets the rules during the execution of application program. A small scale embedded system may not have RTOS.
So we can define an embedded system as a Microcontroller based, software driven, reliable, real-time control system.
Characteristics of an Embedded System
Single-functioned − An embedded system usually performs a specialized operation and does the same repeatedly. For example: A pager always functions as a pager.
Tightly constrained − All computing systems have constraints on design metrics, but those on an embedded system can be especially tight. Design metrics is a measure of an implementation's features such as its cost, size, power, and performance. It must be of a size to fit on a single chip, must perform fast enough to process data in real time and consume minimum power to extend battery life.
Reactive and Real time − Many embedded systems must continually react to changes in the system's environment and must compute certain results in real time without any delay. Consider an example of a car cruise controller; it continually monitors and reacts to speed and brake sensors. It must compute acceleration or de-accelerations repeatedly within a limited time; a delayed computation can result in failure to control of the car.
Microprocessors based − It must be microprocessor or microcontroller based.
Memory − It must have a memory, as its software usually embeds in ROM. It does not need any secondary memories in the computer.
Connected − It must have connected peripherals to connect input and output devices.
HW-SW systems − Software is used for more features and flexibility. Hardware is used for performance and security.
Advantages
- Easily Customizable
- Low power consumption
- Low cost
- Enhanced performance
Disadvantages
- High development effort
- Larger time to market
Basic Structure of an Embedded System
The following illustration shows the basic structure of an embedded system −
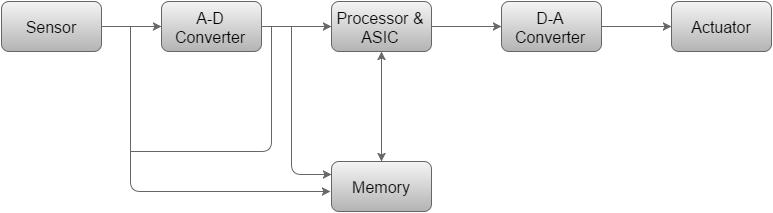
Sensor − It measures the physical quantity and converts it to an electrical signal which can be read by an observer or by any electronic instrument like an A2D converter. A sensor stores the measured quantity to the memory.
A-D Converter − An analog-to-digital converter converts the analog signal sent by the sensor into a digital signal.
Processor & ASICs − Processors process the data to measure the output and store it to the memory.
D-A Converter − A digital-to-analog converter converts the digital data fed by the processor to analog data
Actuator − An actuator compares the output given by the D-A Converter to the actual (expected) output stored in it and stores the approved output.
