
Article Categories
- All Categories
-
 Data Structure
Data Structure
-
 Networking
Networking
-
 RDBMS
RDBMS
-
 Operating System
Operating System
-
 Java
Java
-
 MS Excel
MS Excel
-
 iOS
iOS
-
 HTML
HTML
-
 CSS
CSS
-
 Android
Android
-
 Python
Python
-
 C Programming
C Programming
-
 C++
C++
-
 C#
C#
-
 MongoDB
MongoDB
-
 MySQL
MySQL
-
 Javascript
Javascript
-
 PHP
PHP
-
 Economics & Finance
Economics & Finance
Systems of Track Electrification: DC Electrification System
In the direct current (DC) system, DC series motors are used for running the electric trains. The DC series motors are used in electric trains due to their following advantages −
They have very high starting torque.
DC series motor has smaller weight to power ratio.
DC series motor has self-speed regulating property.
They have low maintenance cost.
The DC series motor has high acceleration and retardation.
DC Electrification System
In the DC system of track electrification, the DC power to be fed to the DC series motor is obtained from substations which are located at a distance of 3 to 5 km for urban and suburban railway service and 15 to 30 km for main line service.
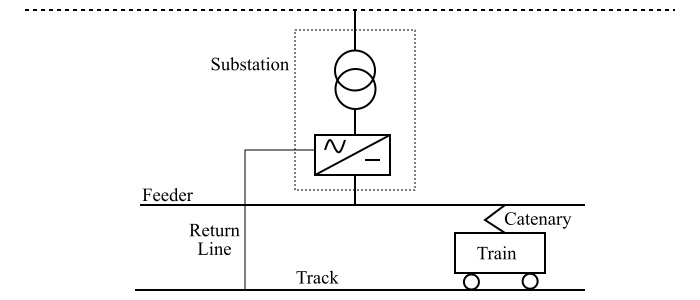
The DC electrification system uses 600 V DC to 750 V DC for urban services and 1500 V DC to 3000 V DC for main line service.
The substation for DC electrification system consists of a transformer and mercury arc rectifier or rotary converter. These substations are usually automatic and remote controlled.
The substations are usually fed from 33 kV to 110 kV, 3-phase AC supply and transformers are employed for conversion of this high voltage to AC low voltage. This AC low voltage is fed to rotary converter or mercury arc rectifiers which converts the AC voltage into DC voltage.
The DC voltage obtained is either 1500 V DC or 3000 V DC and this DC voltage is fed to catenary to be tapped by DC series motors fitted between the wheels of various compartments of the electric train. The return path is provided through rails.
To have high voltage AC fed to the substations and then getting converted into DC, rather than having DC fed directly to the substations reduce the cost of transmission lines and also reduce the copper losses because smaller currents flow at high voltages.
Advantages of DC Electrification System
The direct current (DC) system of track electrification has the following advantages −
DC trains consumes less electrical energy.
The DC system does not interfere with the overhead communication lines.
The equipment of DC train are lighter, less costly and more efficient.
The DC series motors are better for the frequent and rapid acceleration of heavy trains.
In terms of initial and maintenance cost, the conductor rail is less costly for distribution system.
Disadvantages of DC Electrification System
The disadvantages of the DC system of track electrification include the following −
DC electrification system involves high cost of sub-stations.
DC electrification system requires that the sub-stations are to be located at smaller distances so that copper losses and voltage drops in the lines are reduced.
In case of DC system, the provision of negative booster is a must.
Applications of DC Electrification system
The direct current (DC) system for track electrification is more suitable for short distances and in the railway services where frequent stops are required.

6K+ Views
