
Article Categories
- All Categories
-
 Data Structure
Data Structure
-
 Networking
Networking
-
 RDBMS
RDBMS
-
 Operating System
Operating System
-
 Java
Java
-
 MS Excel
MS Excel
-
 iOS
iOS
-
 HTML
HTML
-
 CSS
CSS
-
 Android
Android
-
 Python
Python
-
 C Programming
C Programming
-
 C++
C++
-
 C#
C#
-
 MongoDB
MongoDB
-
 MySQL
MySQL
-
 Javascript
Javascript
-
 PHP
PHP
-
 Economics & Finance
Economics & Finance
Methods of Starting and Controlling the Speed of DC Traction Motors
In this article, we will take a look at the various methods used for starting and controlling the speed of DC series motors.
Rheostatic Control
The basic traction motor circuit with rheostatic starting is shown in the figure below.
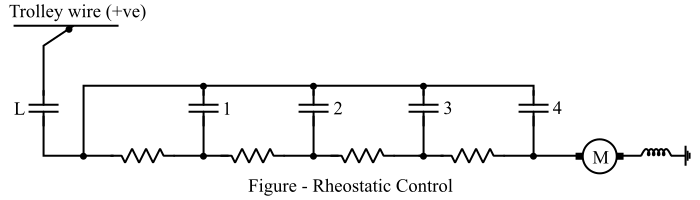
A DC series motor can be started by connecting an external resistance in series with the main circuit of the motor. At the starting instant, the back EMF developed by the motor is zero, thus the resistance connected in series with the motor is maximum and is of such a value that the voltage-drop across it with the full load rated current is equal to the line voltage. As the motor speeds up, the back EMF of the motor increases, therefore, the external resistance is gradually reduced in order to maintain the current constant throughout the starting and accelerating period.
In this method of starting and controlling of speed of DC traction motors, there is a considerable loss of energy in the external circuit. The resistors used in this method are designed for short time rating and not for continuous rating. It is because, they are required to carry the current only during starting of motors. Therefore, the motor can have only one speed characteristic.
Series-Parallel Control
The chief disadvantage of wastage of electrical energy in the rheostatic control is partly overcome in the series-parallel method, when there are two or more DC traction motors.
Step I
Consider two DC series motors, the two motors are first connected in series with each other and a starting or control resistance as shown in Figure-(a). The control resistance is gradually cut out by the controller as the motors attain the speed and finally the control resistance is totally removed from the circuit, then each motor has one half of the line voltage across it as shown in Figure-(b). In this way, the first running position of the motors is obtained. In this position for any given value of armature current, each motor will run at half of its normal speed.
%20(b).png)
Here, it can be noted that there is no external resistance in the circuit. Therefore, there is no wastage of energy and so motors operate at an efficiency nearly equal to that obtainable with full line voltage across the terminal of each motor.
Step II
In the second step, the two motors are connected in parallel and in series with an external variable resistance as shown in Figure-(c). This resistance is gradually cut out as the motors attain the speed and finally this resistance is totally removed from the circuit as shown in Figure-(d). In this way, the second running position is obtained and in this position, each motor is connected across the full line voltage.
%20(d).png)
Field Control
As the speed of the DC series motor is inversely proportional to the flux, assuming the line voltage constant. Therefore, the speed of the motor can be changed by varying the flux. In case of DC series motor, the flux of the DC series motor can be changed either −
By connecting a variable resistance (known as diverter) in parallel with the series field winding, refer Figure-1.
By cutting out some of the series field turns, refer Figure-2.
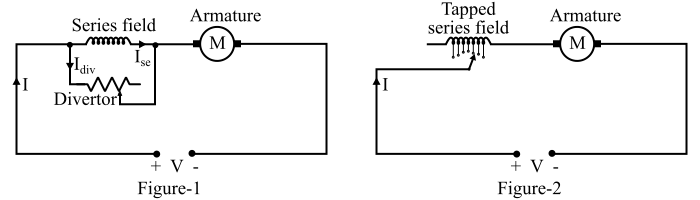
Since, in both of the above cases, the flux can only be reduced, hence this method is also known as field weakening method. By this method, speeds above the normal can be obtained and the speed can be increased to the extent of 15 to 30% of the normal speed.
Actually, the field control method is of no use for starting purpose. This method can only be used increasing the speed of the traction motors up to the extent of 10 to 15% when they have attained maximum possible speed by series-parallel control method.
Motor-Generator Locomotive Control
The motor-generator set consists of a single-phase synchronous motor driving one or two DC generators and an exciter on the same shaft. The M-G set is usually started and brought up to speed by a starting motor and automatically synchronized when it attains speed.
The generator voltage can be regulated by means of field control from exciter. Thus, neither additional resistance is required in traction motor supply circuit nor series-parallel control is required to obtain economical running speeds. Also, it saves rheostatic losses in the traction motor control.

8K+ Views
