
Article Categories
- All Categories
-
 Data Structure
Data Structure
-
 Networking
Networking
-
 RDBMS
RDBMS
-
 Operating System
Operating System
-
 Java
Java
-
 MS Excel
MS Excel
-
 iOS
iOS
-
 HTML
HTML
-
 CSS
CSS
-
 Android
Android
-
 Python
Python
-
 C Programming
C Programming
-
 C++
C++
-
 C#
C#
-
 MongoDB
MongoDB
-
 MySQL
MySQL
-
 Javascript
Javascript
-
 PHP
PHP
-
 Economics & Finance
Economics & Finance
Selected Reading
How to detect the color using OpenCV in C++?
We will understand how to detect specific color and track object based on color. Performance of color detection and color detection based tracking system is environment dependent.
If you change light of the room or if you change background color, there will be significant effect on color detection.
The following program demonstrates how to detect the color using OpenCV in C++.
Example
#include<iostream>
#include<opencv2/highgui/highgui.hpp>
#include<opencv2/imgproc/imgproc.hpp>
using namespace std;
using namespace cv;
int main(int argc, char** argv) {
VideoCapture video_load(0);//capturing video from default camera//
namedWindow("Adjust");//declaring window to show the image//
int Hue_Lower_Value = 0;//initial hue value(lower)//
int Hue_Lower_Upper_Value = 22;//initial hue value(upper)//
int Saturation_Lower_Value = 0;//initial saturation(lower)//
int Saturation_Upper_Value = 255;//initial saturation(upper)//
int Value_Lower = 0;//initial value (lower)//
int Value_Upper = 255;//initial saturation(upper)//
createTrackbar("Hue_Lower", "Adjust", &Hue_Lower_Value, 179);//track-bar for lower hue//
createTrackbar("Hue_Upper", "Adjust", &Hue_Lower_Upper_Value, 179);//track-bar for lower-upper hue//
createTrackbar("Sat_Lower", "Adjust", &Saturation_Lower_Value, 255);//track-bar for lower saturation//
createTrackbar("Sat_Upper", "Adjust", &Saturation_Upper_Value, 255);//track-bar for higher saturation//
createTrackbar("Val_Lower", "Adjust", &Value_Lower, 255);//track-bar for lower value//
createTrackbar("Val_Upper", "Adjust", &Value_Upper, 255);//track-bar for upper value//
while (1) {
Mat actual_Image;//matrix to load actual image//
bool temp = video_load.read(actual_Image);//loading actual image to matrix from video stream//
Mat convert_to_HSV;//declaring a matrix to store converted image//
cvtColor(actual_Image, convert_to_HSV, COLOR_BGR2HSV);//converting BGR image to HSV and storing it in convert_to_HSV matrix//
Mat detection_screen;//declaring matrix for window where object will be detected//
inRange(convert_to_HSV,Scalar(Hue_Lower_Value,Saturation_Lower_Value, Value_Lower),Scalar(Hue_Lower_Upper_Value,Saturation_Upper_Value, Value_Upper), detection_screen);//applying track-bar modified value of track-bar//
erode(detection_screen, detection_screen, getStructuringElement(MORPH_ELLIPSE, Size(5, 5)));//morphological opening for removing small objects from foreground//
dilate(detection_screen, detection_screen, getStructuringElement(MORPH_ELLIPSE, Size(5, 5)));//morphological opening for removing small object from foreground//
dilate(detection_screen, detection_screen, getStructuringElement(MORPH_ELLIPSE, Size(5, 5)));//morphological closing for filling up small holes in foreground//
erode(detection_screen, detection_screen, getStructuringElement(MORPH_ELLIPSE, Size(5, 5)));//morphological closing for filling up small holes in foreground//
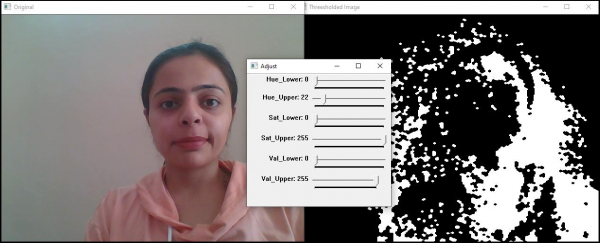
imshow("Threesholded Image", detection_screen);//showing detected object//
imshow("Original", actual_Image);//showing actual image//
if (waitKey(30) == 27){ //if esc is press break the loop//
break;
}
}
return 0;
}
Output

Updated on: 2021-03-10T08:50:24+05:30
2K+ Views

Advertisements