
Article Categories
- All Categories
-
 Data Structure
Data Structure
-
 Networking
Networking
-
 RDBMS
RDBMS
-
 Operating System
Operating System
-
 Java
Java
-
 MS Excel
MS Excel
-
 iOS
iOS
-
 HTML
HTML
-
 CSS
CSS
-
 Android
Android
-
 Python
Python
-
 C Programming
C Programming
-
 C++
C++
-
 C#
C#
-
 MongoDB
MongoDB
-
 MySQL
MySQL
-
 Javascript
Javascript
-
 PHP
PHP
-
 Economics & Finance
Economics & Finance
Electric Traction: Suitability of DC Series Motor in Traction
A DC series motor has the following characteristics that make it suitable for traction work −
DC series motors develop high starting torque which is required for traction purpose.
DC series motors produce high starting torque at low speeds and low torque at high speeds.
The speed of a DC series motor can be controlled easily and effectively.
The torque developed by a DC series motor is unaffected by variations in supply voltage.
DC series motors are ideally suitable for parallel running. Because, the DC series motors when operated in parallel to drive a vehicle by means of different driving axles, share load almost equally even there is unequal wear of different driving wheels. It can be explained as follows −
Consider two identical DC series motors whose speed-current characteristics are shown in the figure.
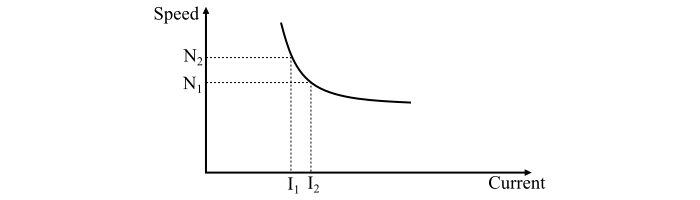
These two motors are connected to different driving axles of the vehicle. For a given speed of vehicle, the peripheral speed of all the driving wheels will be same, but there is slight difference in the diameters of the driving wheels due to unequal wear. Thus, there will be a corresponding difference in the speeds of the driving axles to which they are connected and hence, a difference in the speed of the motors.
The speed of the two motors will be given by the relation,
$$\mathrm{\mathit{\frac{N_{\mathrm{2}}}{N_{\mathrm{1}}}\mathrm{\: =\: }\frac{D_{\mathrm{1}}}{D_{\mathrm{2}}}}}$$
Now, when the motors are working in parallel, the current drawn by each motor does not differ much due to slight difference in the speeds. Also, the voltage across each motor is same, therefore, the motors share the load almost equally.
In case of DC series motors,
$$\mathrm{Speed,\mathit{N\propto \frac{V}{\phi }\propto \frac{\mathrm{1}}{I}}\: \: \: \cdot \cdot \cdot \left ( 1 \right )}$$
Here, assuming that the flux proportional to excitation current and applied voltage constant.
Also,
$$\mathrm{\mathit{T\propto \phi I\propto I^{\mathrm{2}}\: \: }\cdot \cdot \cdot \left ( 2 \right )} $$
On comparing equations (1) & (2), we have,
$$\mathrm{\mathit{N\propto \frac{\mathrm{1}}{I}\propto \frac{\mathrm{1}}{\sqrt{T}}}} $$
But, the power output of a motor is proportional to the product of torque and speed, i.e.,
$$\mathrm{Power\: output\mathit{\propto TN\propto T\times \frac{\mathrm{1}}{\sqrt{T}}\propto \sqrt{T}} }$$
From this equation, we can say that power drawn from supply mains varies as the square root of the load torque for a DC series motor. Thus, the DC series motors to some extent are self-relieving ones.
The commutation of DC series motors is excellent upto twice full load. Therefore, the replacement of brushes, etc. is not required frequently.
With the sudden increase in the supply voltage, the armature current tends to increase, but with the increase in the armature current, the flux also increases which causes increase in back emf and hence the armature current restores to its initial value. Thus, the DC series motors are less susceptible to sudden change in supply voltage.
In DC series motors, up to the point of magnetic saturation, the torque developed is proportional to the square of armature current. Therefore, the DC series motor requires comparatively less increased power input with the increase in load torque. Hence, the DC series motors are capable of withstanding excessive loads.
DC series motors are simple and robust in construction. Thus, the DC series motor is most suitable for all types of traction services, but more particularly for suburban and urban railway services where high rate of acceleration is required.

8K+ Views
