- Design and Analysis of Algorithms
- Home
- Basics of Algorithms
- DAA - Introduction to Algorithms
- DAA - Analysis of Algorithms
- DAA - Methodology of Analysis
- DAA - Asymptotic Notations & Apriori Analysis
- DAA - Time Complexity
- DAA - Master's Theorem
- DAA - Space Complexities
- Divide & Conquer
- DAA - Divide & Conquer Algorithm
- DAA - Max-Min Problem
- DAA - Merge Sort Algorithm
- DAA - Strassen's Matrix Multiplication
- DAA - Karatsuba Algorithm
- DAA - Towers of Hanoi
- Greedy Algorithms
- DAA - Greedy Algorithms
- DAA - Travelling Salesman Problem
- DAA - Prim's Minimal Spanning Tree
- DAA - Kruskal's Minimal Spanning Tree
- DAA - Dijkstra's Shortest Path Algorithm
- DAA - Map Colouring Algorithm
- DAA - Fractional Knapsack
- DAA - Job Sequencing with Deadline
- DAA - Optimal Merge Pattern
- Dynamic Programming
- DAA - Dynamic Programming
- DAA - Matrix Chain Multiplication
- DAA - Floyd Warshall Algorithm
- DAA - 0-1 Knapsack Problem
- DAA - Longest Common Subsequence Algorithm
- DAA - Travelling Salesman Problem using Dynamic Programming
- Randomized Algorithms
- DAA - Randomized Algorithms
- DAA - Randomized Quick Sort Algorithm
- DAA - Karger's Minimum Cut Algorithm
- DAA - Fisher-Yates Shuffle Algorithm
- Approximation Algorithms
- DAA - Approximation Algorithms
- DAA - Vertex Cover Problem
- DAA - Set Cover Problem
- DAA - Travelling Salesperson Approximation Algorithm
- Sorting Techniques
- DAA - Bubble Sort Algorithm
- DAA - Insertion Sort Algorithm
- DAA - Selection Sort Algorithm
- DAA - Shell Sort Algorithm
- DAA - Heap Sort Algorithm
- DAA - Bucket Sort Algorithm
- DAA - Counting Sort Algorithm
- DAA - Radix Sort Algorithm
- DAA - Quick Sort Algorithm
- Searching Techniques
- DAA - Searching Techniques Introduction
- DAA - Linear Search
- DAA - Binary Search
- DAA - Interpolation Search
- DAA - Jump Search
- DAA - Exponential Search
- DAA - Fibonacci Search
- DAA - Sublist Search
- DAA - Hash Table
- Graph Theory
- DAA - Shortest Paths
- DAA - Multistage Graph
- DAA - Optimal Cost Binary Search Trees
- Heap Algorithms
- DAA - Binary Heap
- DAA - Insert Method
- DAA - Heapify Method
- DAA - Extract Method
- Complexity Theory
- DAA - Deterministic vs. Nondeterministic Computations
- DAA - Max Cliques
- DAA - Vertex Cover
- DAA - P and NP Class
- DAA - Cook's Theorem
- DAA - NP Hard & NP-Complete Classes
- DAA - Hill Climbing Algorithm
- DAA Useful Resources
- DAA - Quick Guide
- DAA - Useful Resources
- DAA - Discussion
Multistage Graph

Multistage Graph
A multistage graph G = (V, E) is a directed graph where vertices are partitioned into k (where k > 1) number of disjoint subsets S = {s1,s2,…,sk} such that edge (u, v) is in E, then u Є si and v Є s1 + 1 for some subsets in the partition and |s1| = |sk| = 1.
The vertex s Є s1 is called the source and the vertex t Є sk is called sink.
G is usually assumed to be a weighted graph. In this graph, cost of an edge (i, j) is represented by c(i, j). Hence, the cost of path from source s to sink t is the sum of costs of each edges in this path.
The multistage graph problem is finding the path with minimum cost from source s to sink t.
Example
Consider the following example to understand the concept of multistage graph.
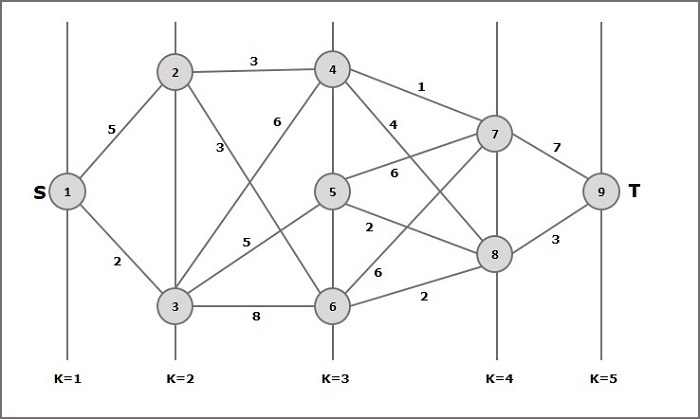
According to the formula, we have to calculate the cost (i, j) using the following steps
Step 1: Cost (K-2, j)
In this step, three nodes (node 4, 5. 6) are selected as j. Hence, we have three options to choose the minimum cost at this step.
Cost(3, 4) = min {c(4, 7) + Cost(7, 9),c(4, 8) + Cost(8, 9)} = 7
Cost(3, 5) = min {c(5, 7) + Cost(7, 9),c(5, 8) + Cost(8, 9)} = 5
Cost(3, 6) = min {c(6, 7) + Cost(7, 9),c(6, 8) + Cost(8, 9)} = 5
Step 2: Cost (K-3, j)
Two nodes are selected as j because at stage k - 3 = 2 there are two nodes, 2 and 3. So, the value i = 2 and j = 2 and 3.
Cost(2, 2) = min {c(2, 4) + Cost(4, 8) + Cost(8, 9),c(2, 6) +
Cost(6, 8) + Cost(8, 9)} = 8
Cost(2, 3) = {c(3, 4) + Cost(4, 8) + Cost(8, 9), c(3, 5) + Cost(5, 8)+ Cost(8, 9), c(3, 6) + Cost(6, 8) + Cost(8, 9)} = 10
Step 3: Cost (K-4, j)
Cost (1, 1) = {c(1, 2) + Cost(2, 6) + Cost(6, 8) + Cost(8, 9), c(1, 3) + Cost(3, 5) + Cost(5, 8) + Cost(8, 9))} = 12
c(1, 3) + Cost(3, 6) + Cost(6, 8 + Cost(8, 9))} = 13
Hence, the path having the minimum cost is 1→ 3→ 5→ 8→ 9.
#include <stdio.h>
#include <stdlib.h>
#include <stdbool.h>
#include <limits.h>
// Function to find the minimum cost path in the multistage graph
typedef struct {
int *path;
int length;
} Result;
Result multistage_graph(int graph[][2], int num_edges, int num_vertices, int stages[][3], int num_stages) {
// Initialize the lists to store the minimum costs and the next vertex in the path for each vertex
int *min_costs = (int *)malloc(num_vertices * sizeof(int));
int *next_vertex = (int *)malloc(num_vertices * sizeof(int));
for (int i = 0; i < num_vertices; i++) {
min_costs[i] = INT_MAX;
next_vertex[i] = -1;
}
// Initialize the minimum cost for the sink vertex to 0
min_costs[num_vertices - 1] = 0;
// Traverse the graph in reverse order starting from the second-last stage
for (int i = num_stages - 2; i >= 0; i--) {
for (int j = 0; j < num_vertices; j++) {
if (stages[i][0] == j || stages[i][1] == j || stages[i][2] == j) {
for (int k = 0; k < num_edges; k++) {
if (graph[k][0] == j) {
int neighbor = graph[k][1];
int cost = graph[k][2] + min_costs[neighbor];
if (cost < min_costs[j]) {
// Update the minimum cost and next vertex for the current vertex
min_costs[j] = cost;
next_vertex[j] = neighbor;
}
}
}
}
}
}
// Reconstruct the minimum cost path from source to sink
int *path = (int *)malloc(num_vertices * sizeof(int));
int current_vertex = 0; // Start from the source vertex
int path_length = 0;
while (current_vertex != -1) {
path[path_length++] = current_vertex;
current_vertex = next_vertex[current_vertex];
}
// Free the dynamically allocated memory for min_costs and next_vertex
free(min_costs);
free(next_vertex);
// Store the result in a Result structure
Result result;
result.path = path;
result.length = path_length;
return result;
}
int main() {
// Define the multistage graph represented as an adjacency list
int graph[][2] = {
{0, 1}, {0, 2},
{1, 3}, {1, 4},
{2, 3}, {2, 4},
{3, 5},
{4, 5},
{5, 6},
{6, 7},
{7, 8}
};
int num_edges = sizeof(graph) / sizeof(graph[0]);
// Define the stages of the multistage graph
int stages[][3] = {
{8}, // Sink stage
{6, 7}, // Stage K-1
{3, 4, 5}, // Stage K-2
{1, 2} // Source stage
};
int num_stages = sizeof(stages) / sizeof(stages[0]);
int num_vertices = 9; // Total number of vertices in the graph
// Find the minimum cost path and cost using the multistage_graph function
Result result = multistage_graph(graph, num_edges, num_vertices, stages, num_stages);
// Print the result
printf("Minimum cost path: ");
for (int i = 0; i < result.length; i++) {
printf("%d ", result.path[i]);
}
printf("\nMinimum cost: %d\n", result.path[result.length - 1]);
// Free the dynamically allocated memory for the path
free(result.path);
return 0;
}
Output
Minimum cost path: 0 2 Minimum cost: 2
#include <iostream>
#include <vector>
#include <unordered_map>
#include <limits>
using namespace std;
// Function to find the minimum cost path in the multistage graph
pair<vector<int>, int> multistage_graph(unordered_map<int, unordered_map<int, int>>& graph, vector<vector<int>>& stages) {
int num_stages = stages.size();
int num_vertices = graph.size();
// Initialize the lists to store the minimum costs and the next vertex in the path for each vertex
vector<int> min_costs(num_vertices, numeric_limits<int>::max());
vector<int> next_vertex(num_vertices, -1);
// Initialize the minimum cost for the sink vertex to 0
min_costs[num_vertices - 1] = 0;
// Traverse the graph in reverse order starting from the second-last stage
for (int i = num_stages - 2; i >= 0; i--) {
for (int vertex : stages[i]) {
for (auto neighbor : graph[vertex]) {
int cost = neighbor.second + min_costs[neighbor.first];
if (cost < min_costs[vertex]) {
// Update the minimum cost and next vertex for the current vertex
min_costs[vertex] = cost;
next_vertex[vertex] = neighbor.first;
}
}
}
}
// Reconstruct the minimum cost path from source to sink
vector<int> path;
int current_vertex = 0; // Start from the source vertex
while (current_vertex != -1) {
path.push_back(current_vertex);
current_vertex = next_vertex[current_vertex];
}
// Return the path and the minimum cost as a pair
return std::make_pair(path, min_costs[0]);
}
int main() {
// Define the multistage graph represented as an adjacency map
unordered_map<int, unordered_map<int, int>> graph = {
{0, {{1, 2}, {2, 3}}},
{1, {{3, 5}, {4, 2}}},
{2, {{3, 4}, {4, 1}}},
{3, {{5, 6}}},
{4, {{5, 3}}},
{5, {{6, 1}}},
{6, {{7, 1}}},
{7, {{8, 1}}},
{8, {}}
};
// Define the stages of the multistage graph
vector<vector<int>> stages = {
{8}, // Sink stage
{6, 7}, // Stage K-1
{3, 4, 5}, // Stage K-2
{1, 2} // Source stage
};
// Find the minimum cost path and cost using the multistage_graph function
auto result = multistage_graph(graph, stages);
// Print the result
cout << "Minimum cost path: ";
for (int vertex : result.first) {
cout << vertex << " ";
}
cout << std::endl;
cout << "Minimum cost: " << result.second << endl;
return 0;
}
Output
Minimum cost path: 0 Minimum cost: 2147483647
import java.util.*;
public class Main {
// Function to find the minimum cost path in the multistage graph
static class Result {
List<Integer> path;
int cost;
Result(List<Integer> path, int cost) {
this.path = path;
this.cost = cost;
}
}
static Result multistage_graph(HashMap<Integer, HashMap<Integer, Integer>> graph, List<List<Integer>> stages) {
int num_stages = stages.size();
int num_vertices = graph.size();
// Initialize the lists to store the minimum costs and the next vertex in the path for each vertex
List<Integer> min_costs = new ArrayList<>(Collections.nCopies(num_vertices, Integer.MAX_VALUE));
List<Integer> next_vertex = new ArrayList<>(Collections.nCopies(num_vertices, -1));
// Initialize the minimum cost for the sink vertex to 0
min_costs.set(num_vertices - 1, 0);
// Traverse the graph in reverse order starting from the second-last stage
for (int i = num_stages - 2; i >= 0; i--) {
for (int vertex : stages.get(i)) {
for (Map.Entry<Integer, Integer> neighbor : graph.get(vertex).entrySet()) {
int cost = neighbor.getValue() + min_costs.get(neighbor.getKey());
if (cost < min_costs.get(vertex)) {
// Update the minimum cost and next vertex for the current vertex
min_costs.set(vertex, cost);
next_vertex.set(vertex, neighbor.getKey());
}
}
}
}
// Reconstruct the minimum cost path from source to sink
List<Integer> path = new ArrayList<>();
int current_vertex = 0; // Start from the source vertex
while (current_vertex != -1) {
path.add(current_vertex);
current_vertex = next_vertex.get(current_vertex);
}
// Return the path and the minimum cost as a Result object
return new Result(path, min_costs.get(0));
}
public static void main(String[] args) {
// Define the multistage graph represented as an adjacency map
HashMap<Integer, HashMap<Integer, Integer>> graph = new HashMap<>();
graph.put(0, new HashMap<>());
graph.get(0).put(1, 2);
graph.get(0).put(2, 3);
graph.put(1, new HashMap<>());
graph.get(1).put(3, 5);
graph.get(1).put(4, 2);
graph.put(2, new HashMap<>());
graph.get(2).put(3, 4);
graph.get(2).put(4, 1);
graph.put(3, new HashMap<>());
graph.get(3).put(5, 6);
graph.put(4, new HashMap<>());
graph.get(4).put(5, 3);
graph.put(5, new HashMap<>());
graph.get(5).put(6, 1);
graph.put(6, new HashMap<>());
graph.get(6).put(7, 1);
graph.put(7, new HashMap<>());
graph.get(7).put(8, 1);
graph.put(8, new HashMap<>());
// Define the stages of the multistage graph
List<List<Integer>> stages = new ArrayList<>();
stages.add(Collections.singletonList(8)); // Sink stage
stages.add(Arrays.asList(6, 7)); // Stage K-1
stages.add(Arrays.asList(3, 4, 5)); // Stage K-2
stages.add(Arrays.asList(1, 2)); // Source stage
// Find the minimum cost path and cost using the multistage_graph function
Result result = multistage_graph(graph, stages);
// Print the result
System.out.print("Minimum cost path: ");
for (int vertex : result.path) {
System.out.print(vertex + " \n");
}
System.out.println();
System.out.println("Minimum cost: " + result.cost);
}
}
Output
Minimum cost path: 0 Minimum cost: 2147483647s
def multistage_graph(graph, stages):
num_stages = len(stages)
num_vertices = len(graph)
# Create a list to store the minimum costs for each vertex
min_costs = [float('inf')] * num_vertices
# Create a list to store the next vertex in the path for each vertex
next_vertex = [None] * num_vertices
# Initialize the minimum cost for the sink vertex
min_costs[-1] = 0
# Traverse the graph in reverse order
for i in range(num_stages - 2, -1, -1):
for vertex in stages[i]:
# Calculate the minimum cost and next vertex for the current vertex
for neighbor in graph[vertex]:
cost = graph[vertex][neighbor] + min_costs[neighbor]
if cost < min_costs[vertex]:
min_costs[vertex] = cost
next_vertex[vertex] = neighbor
# Reconstruct the minimum cost path
path = []
current_vertex = 0 # Start from the source vertex
while current_vertex is not None:
path.append(current_vertex)
current_vertex = next_vertex[current_vertex]
return path, min_costs[0]
# Example usage:
if __name__ == "__main__":
# The multistage graph represented as an adjacency dictionary
graph = {
0: {1: 2, 2: 3},
1: {3: 5, 4: 2},
2: {3: 4, 4: 1},
3: {5: 6},
4: {5: 3},
5: {6: 1},
6: {7: 1},
7: {8: 1},
8: {}
}
# Define the stages of the multistage graph
stages = [
[8], # Sink stage
[6, 7], # Stage K-1
[3, 4, 5], # Stage K-2
[1, 2] # Source stage
]
path, min_cost = multistage_graph(graph, stages)
print("Minimum cost path:", path)
print("Minimum cost:", min_cost)
Output
Minimum cost path: [0] Minimum cost: inf